

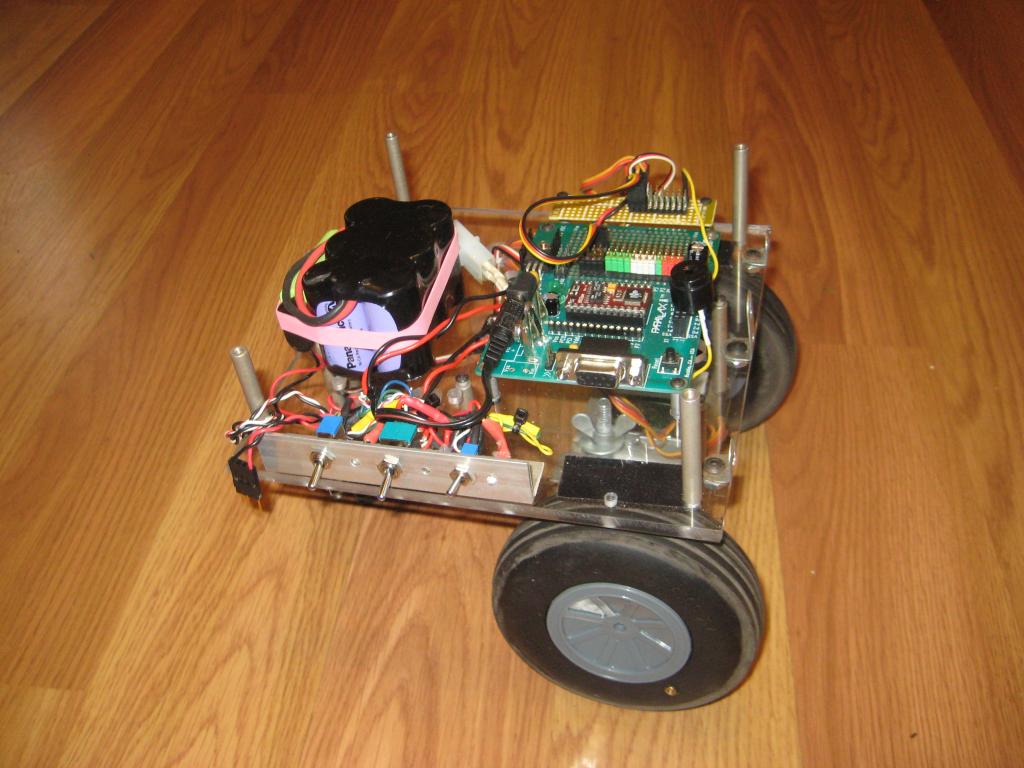
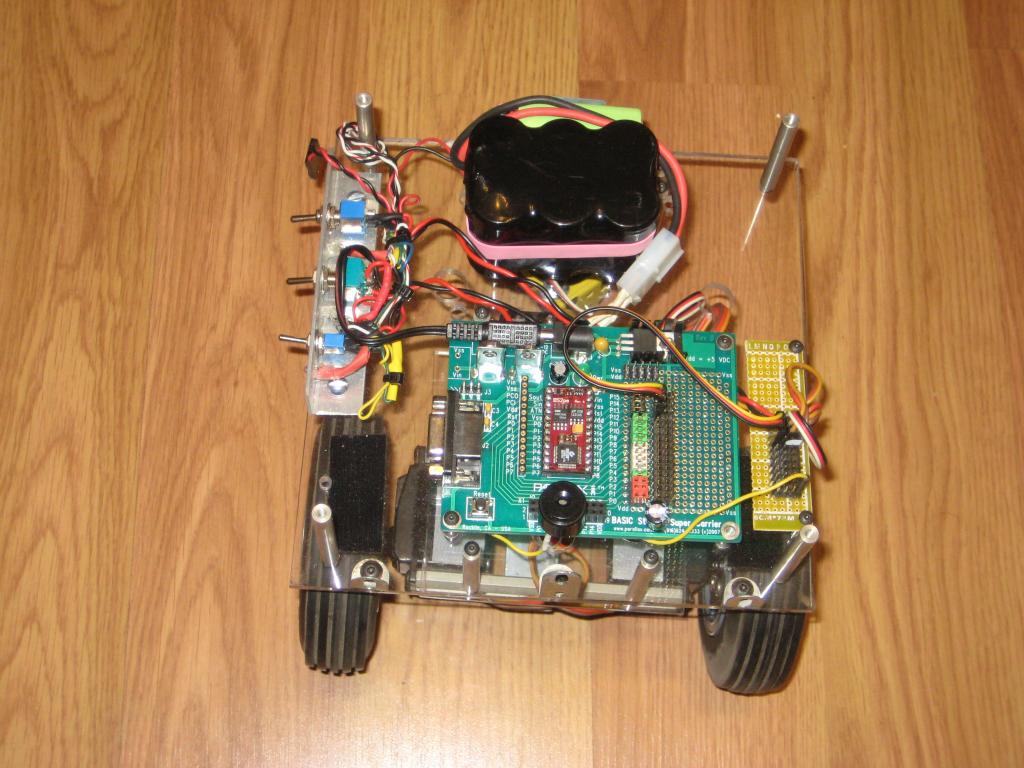
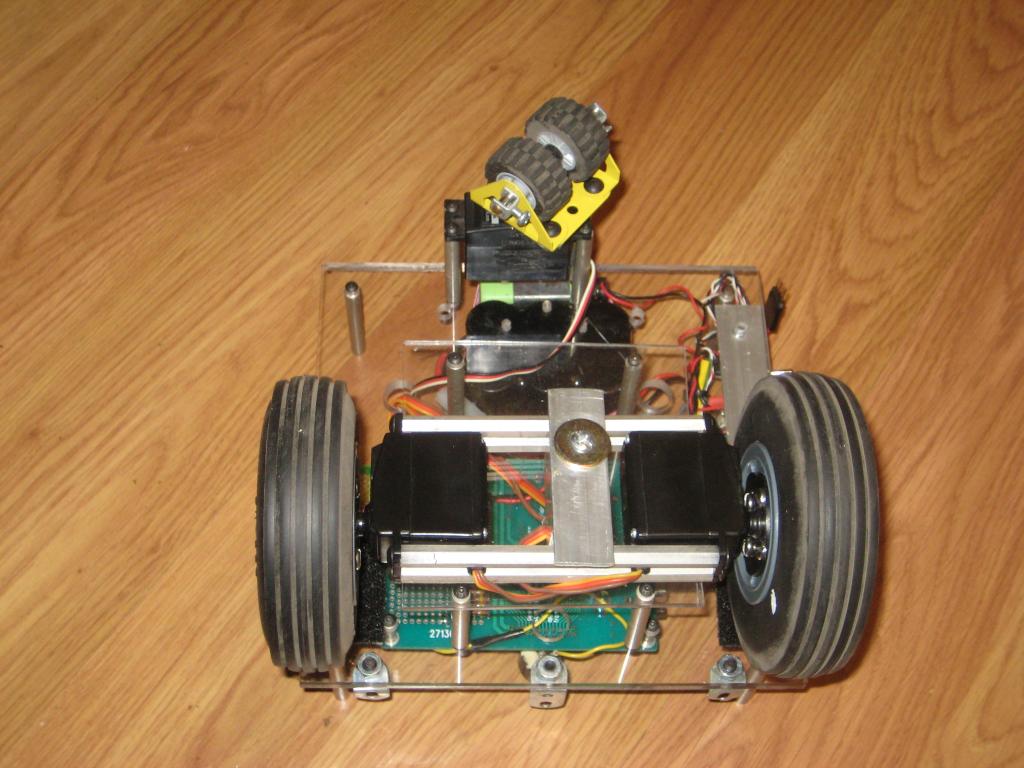
Heavy Duty 3 Servo Robotic Platform
 Crazyrabbit
Posts: 116
Crazyrabbit
Posts: 116
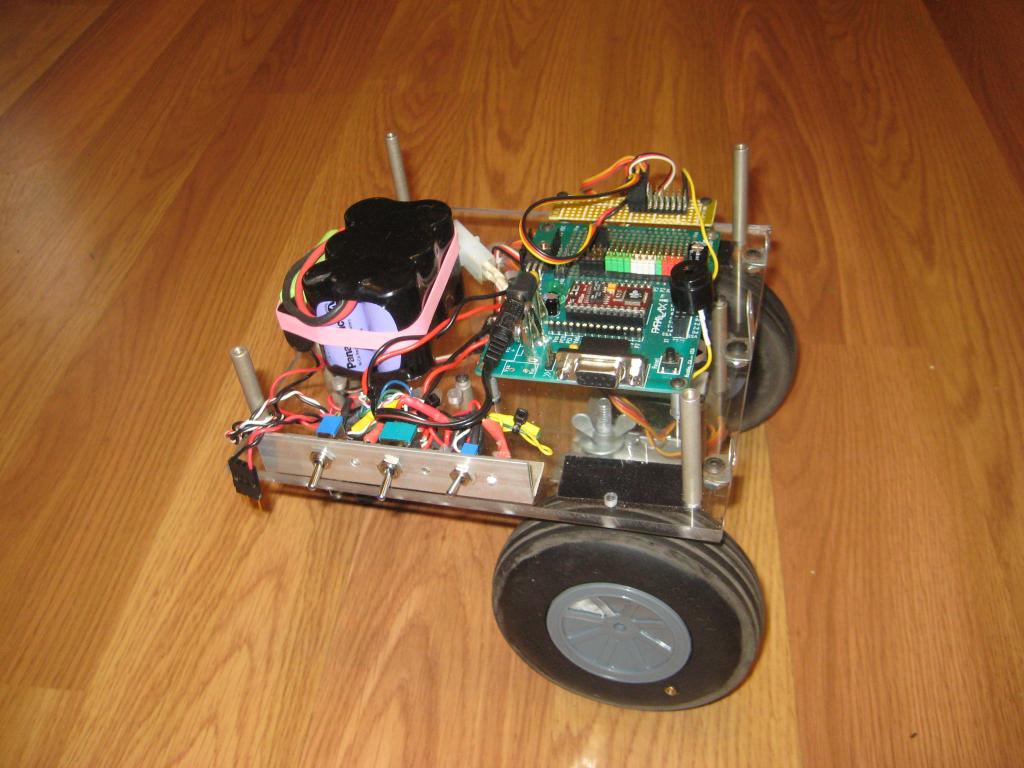
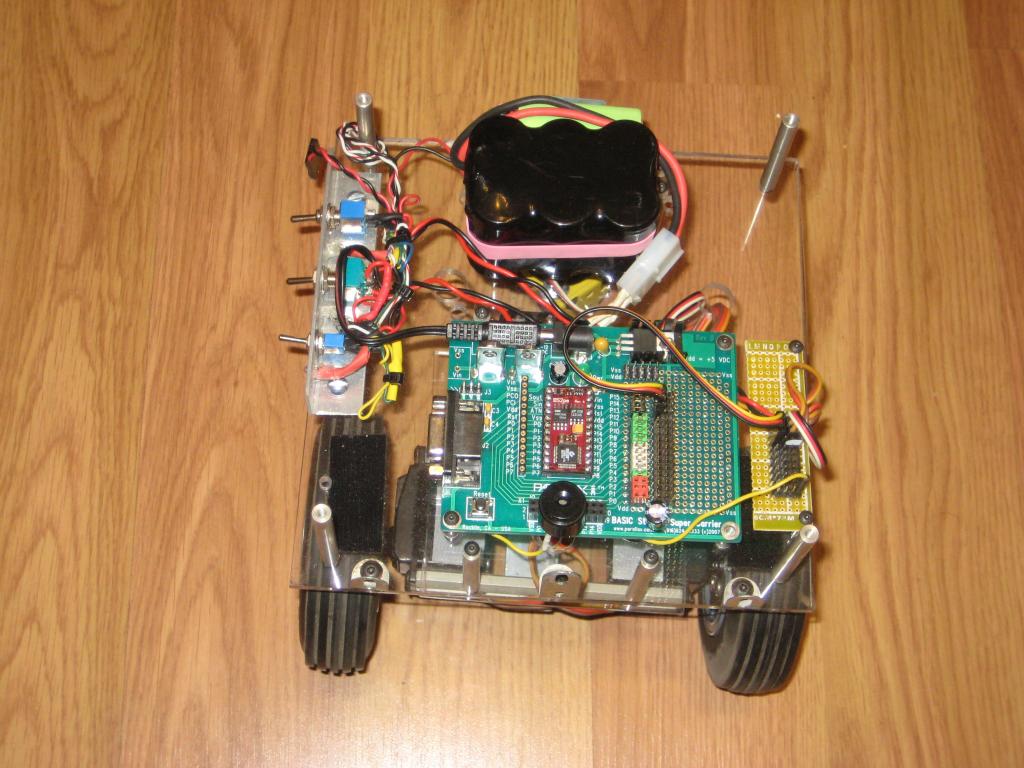
This is a new design I have been working on. Unlike other 3 wheel robots, the back wheels use a servo to steer while turning. It is in sync with the front wheels. It uses 2 x 84oz/inch servos convertted to continious rotation. The 3rd servo is a Parallax for steering the back wheels. I had to use a seperate 7.2V battery for the servos after finding out they threw out too much noise for the BS2PE stamp. The board is a Parallax super carrier board modified for experimentation. It uses 3 switches. The first is for electronics power. The second is for servo power. And the 3rd is for adding a solar panel for charging and running in the future. There is a seperate breadboard with headers for servo and other hi power components that run off the servo battery supply. It is heavy duty using 2 x 3" model airplane tube tires and 2 x 1" lego wheels for steering. It has carried +3 lbs with a plastic box mounted on the top. Here is a video I made using a simple servo test code I use with all my new designs.
http://www.youtube.com/watch?v=oNV-cFBmWAE
More details will be posted in the future
http://www.youtube.com/watch?v=oNV-cFBmWAE
More details will be posted in the future
Comments
A very nice Robot You have constructed.
I see that You are a Rudder Brother, it's a little lonely at times for Us Rudder lovers here.
But those of less Rudder understanding seem to tolerate our hatred of Casters..
Again, Welcome back to the Forums.
They are very significant help, Especially, if Your Life Partner expects to SEE "Results" from Your lab work...
"Colored Lights can Hypnotize" as it were...
The XBee's will keep You busy for some time, Lots of things to do with them,
My favorite, was to combine an XBee with an Accelerometer, and use it as a Tilt controlled Joystick.
Regards
Tommy
What are the advantages of an actively steered wheel versus a caster? How about an omni-wheel like the Stingray's?
One of the bots has what I think is a RFID reader on the side. What is it being used for?
I heartily approve of blinking LED's, and I need to add some to a future project.
Then, The advantage is the same as having 4 QTI sensors mounted on a Servo rotated arm, Or,
Mounting Leds driven by a CD4028BCN, complete with Transistors, Or 4 74HC595's driving 32 Leds.
Even Using a Servo Motor to move the Ping sensor around.. Gadgets, just Gadgets.
As for the RFID reader, Doesn't every Robot have one? How else are You going to tell Your Robot
What pattern You want it to run? With a wave of Your hand, Your Robot will travel in a perfect circle,
Wave Your hand again, and Your Robot will travel in a rectangle pattern, Wave Your hand Yet again,
And Your Robot will lower its QTI sensors to the floor, and seek out a line and follow it...*The sky is the limit.
I suppose the main reason I mess with Rudders, would be that We have a 4000 gallon pond in the back yard,
So I need a good way to control two Paddle wheels and a Rudder for fast manuevers around the Fish...
-Tommy
*limited only by the number of RFID readers you found on sale at the Radio Shack.
and wheels. The first version was just a fast throw togather. I later lowered the Ping. Worked a little better, but not alot. Thanks guys in thr Prop forum for helping me get started on the prop. Sooo much to learn and I am no programming wiz for sure. By the way, I got my X Bee trainer package a few says ago. Here is a short video.
http://www.youtube.com/watch?v=em6eGTuAIYc
.
Keep tweaking Your code and the Bot will stop ramming things, eventually...
Have You put the XBee on Your Robot yet?, I could not see it in the Pictures.
-Tommy
What happens is a person walks by the painting and the Ping senses a person is there. At that moment, the Basic Stamp tells the servos to start moving some panels back and forth.
How do I get the servos to get the message? The Ping only uses one pin. Won't the pulse be just like an echo as far as the servo is concerned?
[IMG]file:///C:/Users/Danny/AppData/Local/Temp/moz-screenshot.png[/IMG]I want to use a do loop so it scans as long as it's plugged in. When someone walks by, it will briefly move a few panels and then pause. If it still detects a person, it will move again, and so on.
Nudge Heartily,
Danny
You make an IF..THEN.. test for the value from the Ping))).
See my program in THIS thread (#38) or the Parallax site's source code.
I wanted to make a Variety of Control options on one Robot. RFID was one of many on that Bot Platform.
Including an emergency joystick with a 74HC165, mandatory IR remote, and the XBee system , Among others...
How about You CrazyRabbit? How are You doing with the XBee stuff now?
Do You have Your Bot spinning in circles using Your Computer keyboard arrow keys?
-Tommy
p.s. @ Danny DonnyBrook, what You are asking, it is worthy of it's own thread, You should start one.