

Propeller based acoustic distance sensor in the works Features?
 Ed T
Posts: 50
Ed T
Posts: 50
Update: This product is now available at Gadget Gangster!!
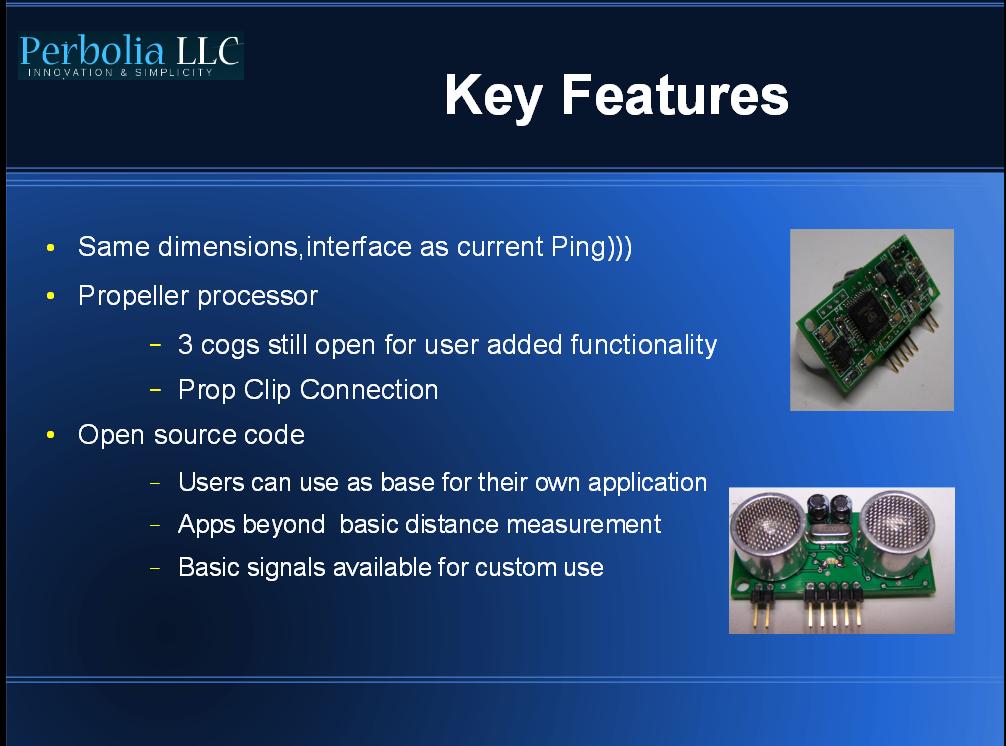
I am in the midst of designing an acoustic based distance sensor product around the Propeller and am looking for some suggestions on features that users would find valuable. The features I am currently incorporating are:
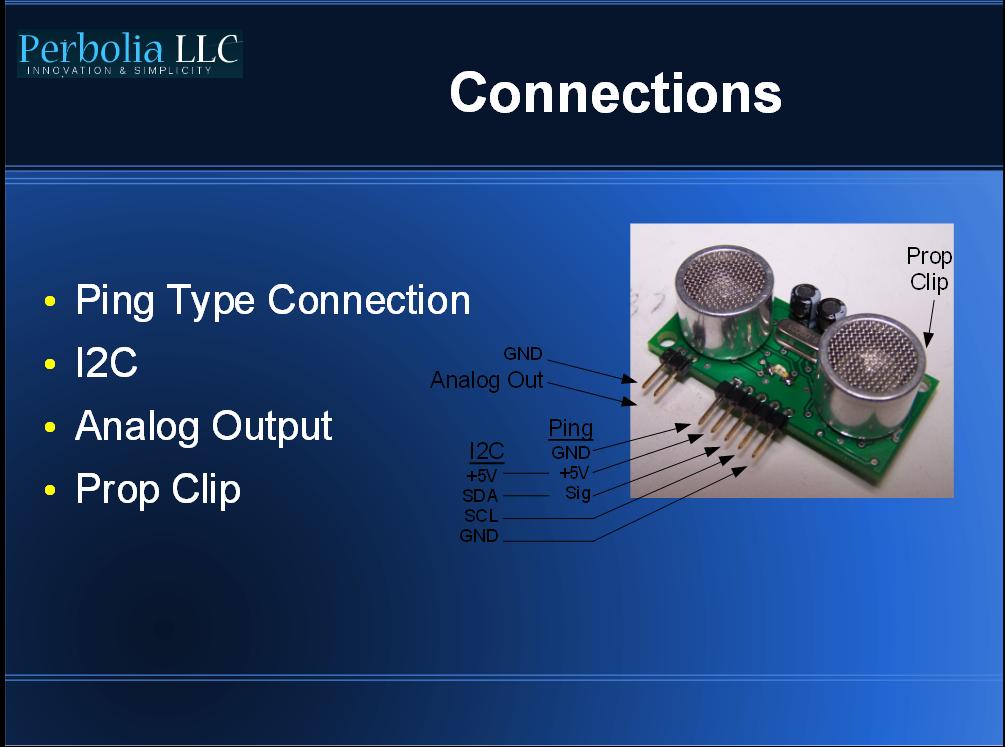
I2C interface
Ping compatible interface (Gnd, +5V, Sig)
Propclip connection
Header connection for additional Prop I/O
Acoustic output drive of +/- 20V, +/-10V, +10V, software selectable
Higher drive voltage gives significant enhancement to range
Analog output of acoustic return signals, software selectable
Open source code
3 Cogs available for user applications
Weatherproof version
Same board size and mounting as the Parallax Ping)))
Potential I2C commands
Set mode: (1) Detect first echo or (2) Measure echo over range, (3) average
Trigger measurement
Set min and max distance
Set echo trigger level and time profile for mode 1
Read echo peak values and times for mode 2
Set # of measurements to average over for mode 3
Set Drive voltage
Turn off “high” voltage circuit
Set # of 40 kHz cycles of output drive
Set various signal processing parameters
Attached are a couple of photos of the first prototype. The electrolytic caps will be replaced with ceramic SMD.
Thanks in advance for any feedback.
- Ed
I am in the midst of designing an acoustic based distance sensor product around the Propeller and am looking for some suggestions on features that users would find valuable. The features I am currently incorporating are:
I2C interface
Ping compatible interface (Gnd, +5V, Sig)
Propclip connection
Header connection for additional Prop I/O
Acoustic output drive of +/- 20V, +/-10V, +10V, software selectable
Higher drive voltage gives significant enhancement to range
Analog output of acoustic return signals, software selectable
Open source code
3 Cogs available for user applications
Weatherproof version
Same board size and mounting as the Parallax Ping)))
Potential I2C commands
Set mode: (1) Detect first echo or (2) Measure echo over range, (3) average
Trigger measurement
Set min and max distance
Set echo trigger level and time profile for mode 1
Read echo peak values and times for mode 2
Set # of measurements to average over for mode 3
Set Drive voltage
Turn off “high” voltage circuit
Set # of 40 kHz cycles of output drive
Set various signal processing parameters
Attached are a couple of photos of the first prototype. The electrolytic caps will be replaced with ceramic SMD.
Thanks in advance for any feedback.
- Ed
1006 x 746 - 86K
1005 x 747 - 70K
Comments
Ken Gracey
Parallax Inc.
@Ken - Thanks for the offer of support! Yes, the goal of the design is to have the Ping form factor and make it the same easy to use interface as the Ping with the option to use the I2C to access additional features and options.
- Ed