

BS2px autonomous vehicle
 robomatics
Posts: 6
robomatics
Posts: 6
This is my project that refers to a robot that is capable to move on specified trajectories, described by point sets on a 2D flat surface. Its brain is a Parallax BS2px processor, with a uM-FPU v3 as a co-processor. I have placed marks on the surface that the robot is moving, so don't misunderstand the marks with line follower systems.
It is a differential drive robot, that is capable to change the speed of its wheels when it needs to turn, so as to move in smooth trajectories.
So, in the video you can see the robot execute a trajectory that is specified by the following schema:
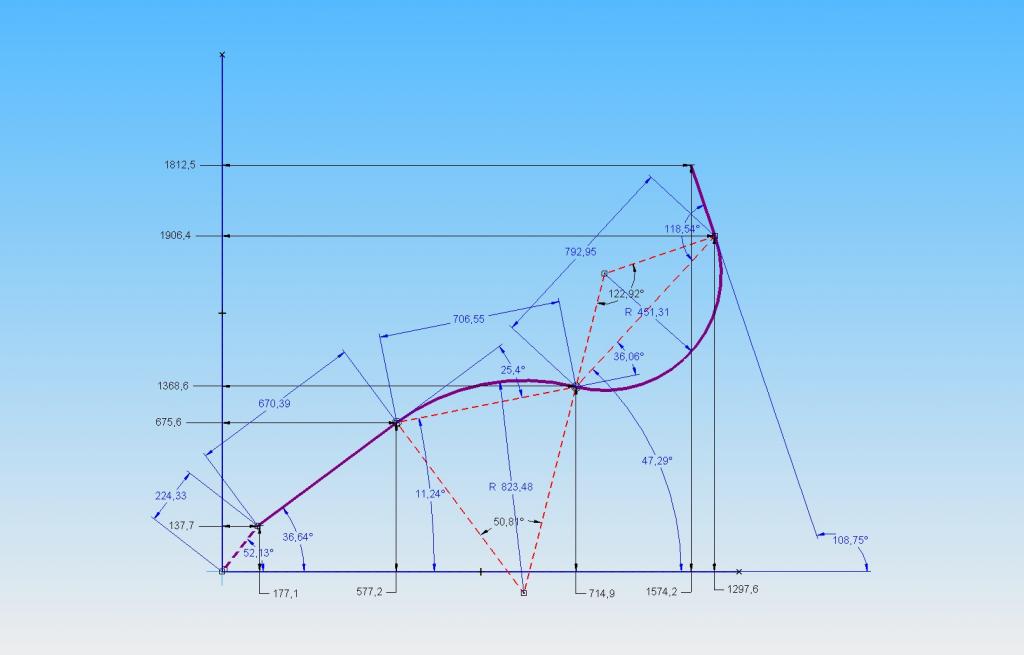
The initializing point is the start of the axies, and the trajectory starts from the point (137.7 , 177.1) so the robot firstly finds its orientation, then moves to the specified point as it is showing by the dotted line. Then it follows the trajectory that is comprised by a segment (l=670.39mm), an arc (r=823.48mm), an arc(r=451.31m) and finally a segment, till it stops.

It is a differential drive robot, that is capable to change the speed of its wheels when it needs to turn, so as to move in smooth trajectories.
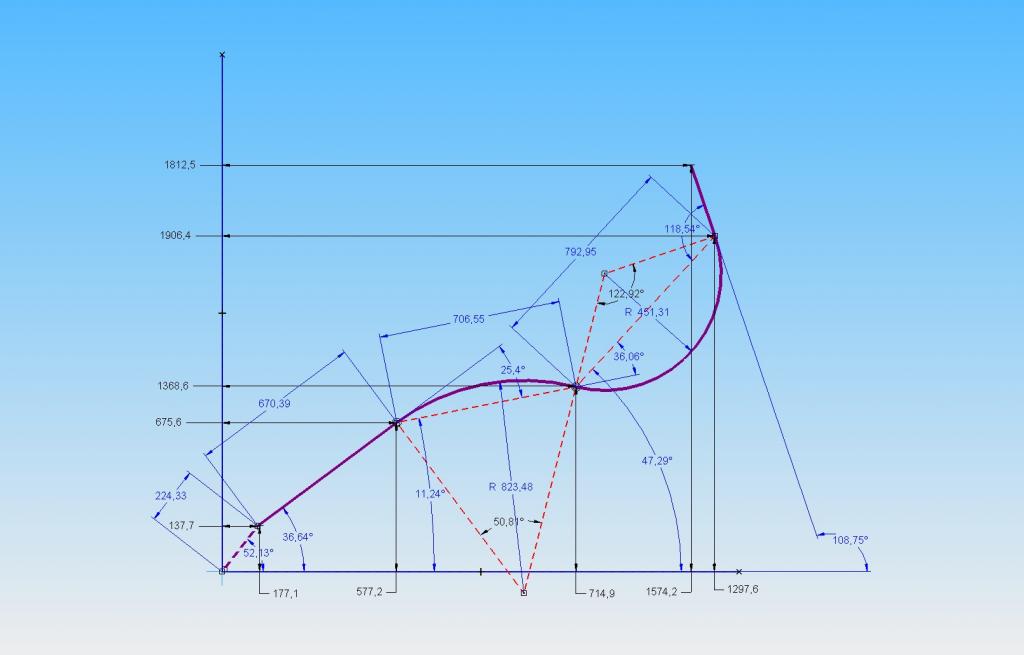
So, in the video you can see the robot execute a trajectory that is specified by the following schema:
The initializing point is the start of the axies, and the trajectory starts from the point (137.7 , 177.1) so the robot firstly finds its orientation, then moves to the specified point as it is showing by the dotted line. Then it follows the trajectory that is comprised by a segment (l=670.39mm), an arc (r=823.48mm), an arc(r=451.31m) and finally a segment, till it stops.
1024 x 655 - 41K
Comments
-Matt
I found THE solution. I discovered a perfect module that has to offer 12bit (4096!!! ppr) resolution and moreover it takes control of the servo that is connected to (with PID function applied) and it can communicate with the stamp via UART. It comes in a kit form and modifies a standard servo to a SUPER servo
In the next days I'm going to post schematics for anyone is interested.
This project is the main part of my diploma thesis. Thanks again for your good words.
The module is called Supermodified and is being sold by a Greek company called 01. You can find details on their site (http://www.01mech.com/supermodified). I used this product with the USART protocol for the communication with the BS2px.