

The Coolest Stingray Robot Remote.... EVER!!
 Microcontrolled
Posts: 2,461
Microcontrolled
Posts: 2,461
I've worked on this for over a month. Behold: The great Stingray Remote! 


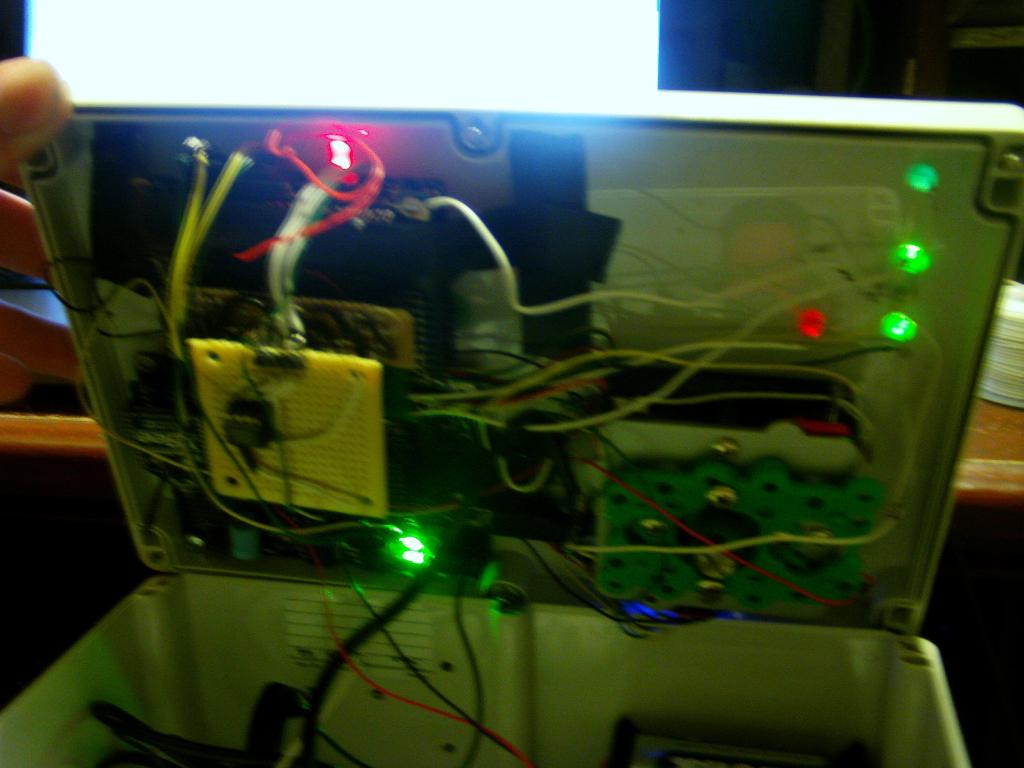


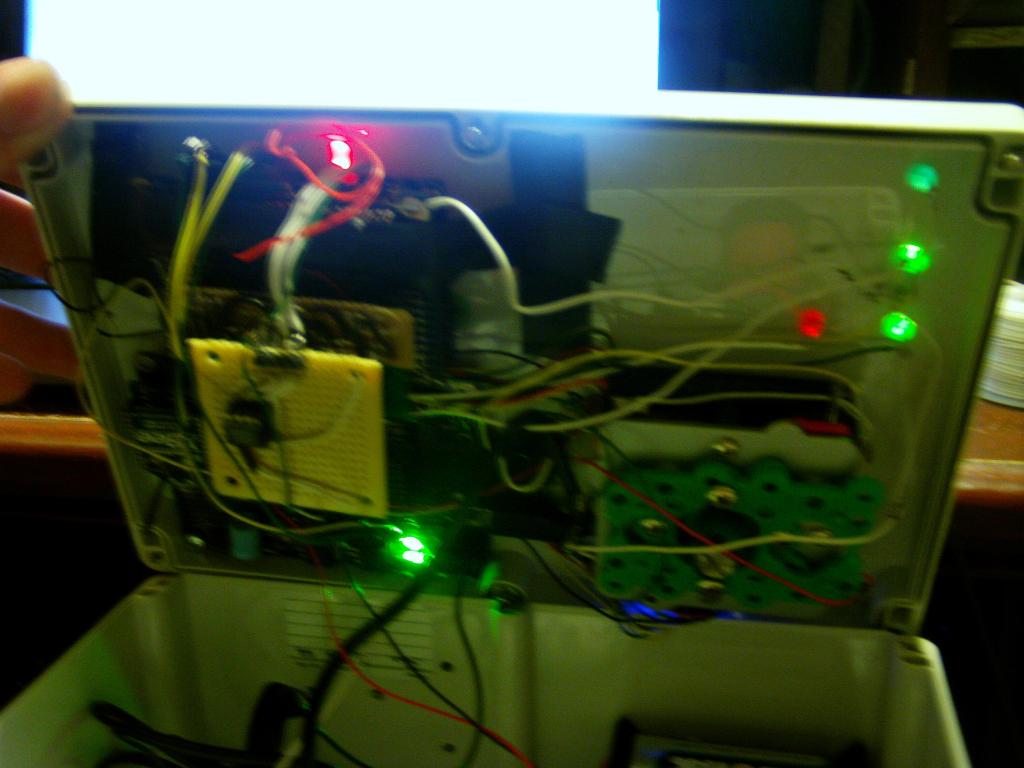
As you can see in the pictures, it has a touchscreen, arcade joystick, speedometer, and indicator LEDs (I could have used the touchscreen but I love LEDs!). It runs on duel Propeller chips, one controlling the display and one to send out and receive data. I like the look and feel of the arcade joystick, and the confirmation of a physical indicator.
Upon boot the touchscreen checks for the robot and the motherboard, then switches to the main menu. Under the controls menu, you can turn on and off perspective steering, progressive control, and high speed steering functions. To change speed, you hold down the "Action" button (the large red arcade button), and move the joystick up or down to adjust the speed accordingly.
The Stingray itself just has an Xbee module and a PING on the front and back. The remote is literally more high-tech then the Stingray! 4 D cells give it a nice wieghty feel - about 7 pounds total! Its fun to drive around, expecially at high speed.
I'll post the code once it is complete.
Thanks,
Microcontrolled
As you can see in the pictures, it has a touchscreen, arcade joystick, speedometer, and indicator LEDs (I could have used the touchscreen but I love LEDs!). It runs on duel Propeller chips, one controlling the display and one to send out and receive data. I like the look and feel of the arcade joystick, and the confirmation of a physical indicator.
Upon boot the touchscreen checks for the robot and the motherboard, then switches to the main menu. Under the controls menu, you can turn on and off perspective steering, progressive control, and high speed steering functions. To change speed, you hold down the "Action" button (the large red arcade button), and move the joystick up or down to adjust the speed accordingly.
The Stingray itself just has an Xbee module and a PING on the front and back. The remote is literally more high-tech then the Stingray! 4 D cells give it a nice wieghty feel - about 7 pounds total! Its fun to drive around, expecially at high speed.
I'll post the code once it is complete.
Thanks,
Microcontrolled

1024 x 768 - 51K

1024 x 768 - 56K

1024 x 768 - 52K
1024 x 768 - 66K

1024 x 768 - 52K

1024 x 768 - 43K
Comments
Any chance of getting some video of this setup in action?
OBC
Paul
Too cool! That looks great.
Is the joy stick proportional? Or does it (the joystick) use four switches like a lot of arcade game controllers?
If it's not proportional, you might want to think about some sort of proportional input. One of my favorite input devices is a Wii Nunchuck (I doubt it would be a good choice in your case). Some sort of analog joystick should work. There are lots of good options to choose from.
After re-reading your post I see you can control the speed separate from the steering. I still think proportional control would make the robot easier to control (assuming you don't already have it).
What does "perspective steering" and "progressive steering" mean?
I like the touchscreen. Does the Stingray send information back to the controller to display on the screen? You could have some sort of graphic to show the Pings' readings.
I think you might be breaking some sort of law. I don't think teenagers are supposed to have this much fun.
Make a movie - I'd like to see it in action too!
-Matt
@Duane Degn: It is a simple joystick with 4 momentary switches, however I believe I will be getting a nice analog joystick soon that will allow for more freedom. As for the perspective and progressive, progressive control is where you only have to tap the joystick to get it moving in that direction. You stop it with the Action button. If progressive control is off, then when you release the joystick the robot stops. I'll demonstrate in the video. Perspective steering I still have not gotten right, but it lets you move the robot due to your position. I really need a compass module to do this right. For example, if perspective steering is on and you click the joystick right, it should turn right then go forward, if you press left after then it will turn 180 degrees and go forward, etc. Automatic mode works alone, but it sometimes malfunctions when you turn it on with the remote. The High-Speed steering and Automatic mode are newer functions just added this week, which is why I haven't had a chance to work out the kinks in them yet.
Thanks for your encouragement!
Microcontrolled
Drop that and it'll leave a mark.
Hope you enjoy it! I demonstrate all the working features of the robot. I have a malfunction halfway through the video, so even things I thought were error free must still have errors. In my next update I'll show all the features that aren't working in this video. Hopefully I'll have the GPS module added by then.
Thanks!
Microcontrolled
Nice Job!
OBC
I have a touchscreen controller I use with my robots. You gave me a bunch of good ideas on features to add.
SparkFun recently started to carry these analog triggers. I need to figure out a way to add them to my controller. I like that they are analog. (I'm a big fan of proportional control.)
I look forward to your next video.
Duane
Nice work and I am with Duane on the proportional control with the joystick. I have some extra joystick modules that are new and was designed for RC control that your stick might be able to fit onto. I plan to sell some of my extras but If you want a couple send me a PM with your adress and I will send you a couple. They have two Pots and stay where you put them so you can move it and it will hold the position. They are about 1 inch or so cubed in size and the arm is a threaded stud so you can put any type of joystick arm you make onto it.
Glad I found it - I usually spend more time in the Robotics forum - guess I have to start reading them all! ;-)
It is actually the coolest Remote Ever!!!
congratulation!
I was wondering what kind of post pushed this thread back up to the top, so this is a pleasant surprise!
I have to say that this is the longest lasting project I've ever owned, probably because of it's versatility. Both the robot and the remote have sat on top of my desk (I still get them out to play with occasionally) WITHOUT either one being salvaged for parts! Usually the biggest danger to my projects is my need to salvage a part out of it because I don't want to spend money on a new one. This usually leads to destruction of my projects, but the robot has stayed strong. When I get enough money to buy a robot arm or parts for one, I'll take this back off the shelf and mount it to the top, then I get the fun of programming it again! :-)
the robot arms that can be bought are way too expensive.
If you manufacture most of the parts from 2mm aluminium stripes it will be much cheaper.
HiTec provides servos in a great variety of strength (torque) and weight.
One of the strongest is this one. http://www.servocity.com/html/hs-805bb_mega_power.html Still at a low price (for that strength)
I estimate 5 servos ranging from the above (for the shoulder of the robot arm down to this one http://www.servocity.com/html/hs-225bb_mighty_mini.html
for the handwrist you pay around $150 for the servos.
best regards
Stefan
It seems simple and very strong!
Martin, perhaps I'll steal some ideas from your design for my next robotic arm
I think it is a perfect solution for cheap and reliable robotic arm. (Have you designed a gripper? If not I have a simple and strong design to suggest you)
It is a very good suggestion for Microcontrolled to save money!
http://forums.parallax.com/showthread.php?130199-Hints-About-My-New-Project-(Video)
Originally the thread was hints about the project, so the thread name doesn't say what it's about.
I am a preteen. Arrest me too!!