

Balancing 'Bot -- in progress

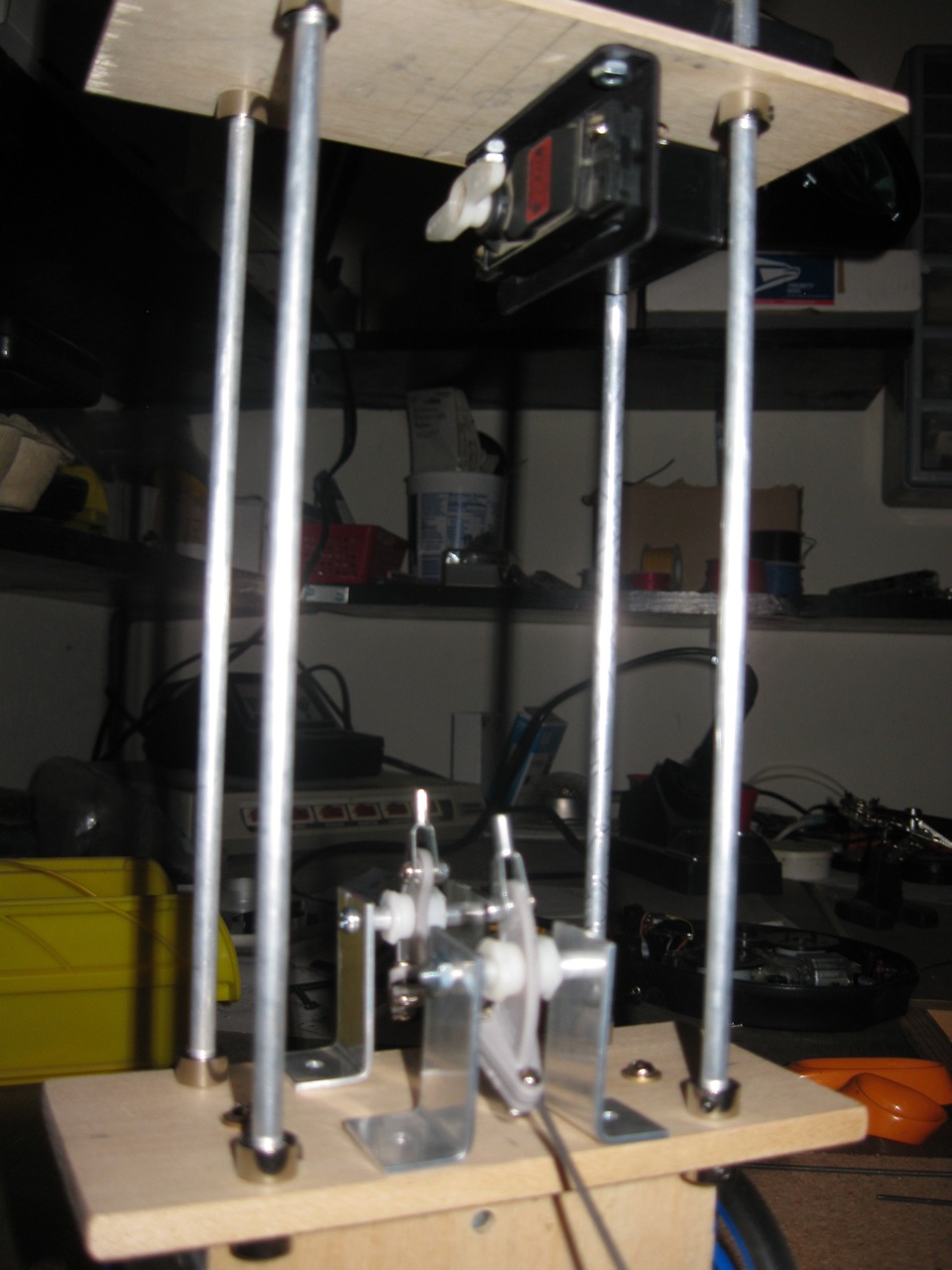
Thought I would share a few photos of initial mechanical assembly of a balancing 'bot I'm working on. The final will be run by an SX48 using a gyro and an accelerometer for a balancing.
The basic materials are aluminum tubing and flats and aircraft hobby plywood. When I disassemble for painting and finishing I'll probably bevel or round of the corners of the horizontal boards for a better, less boxy appearance.
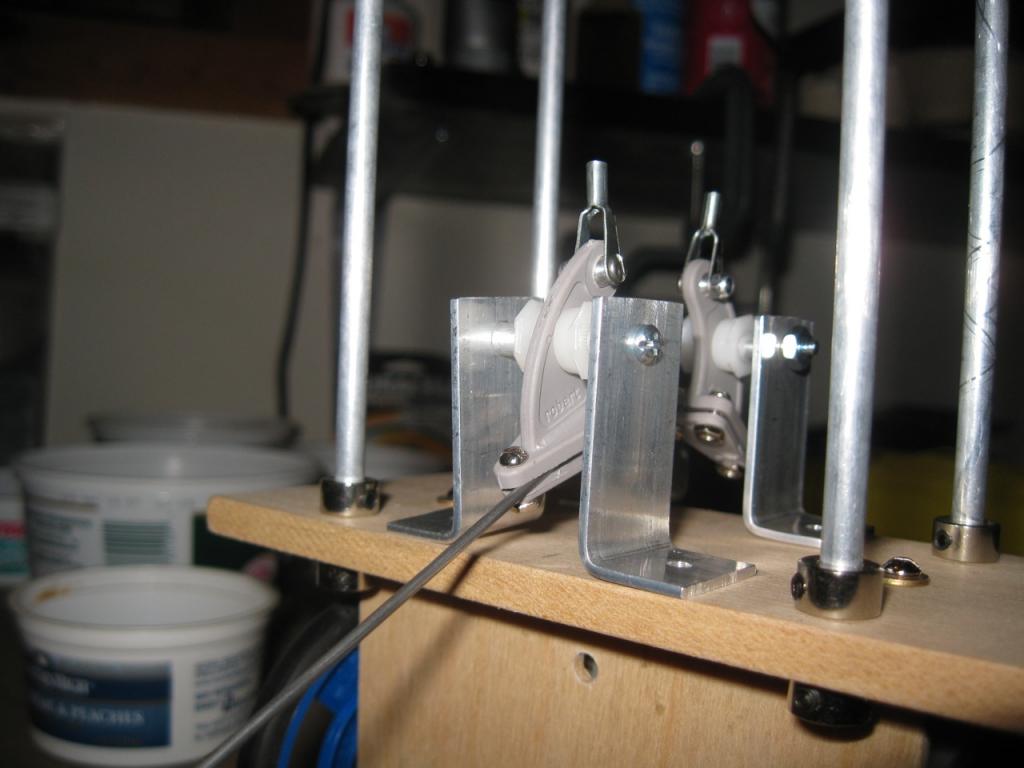
Shown also are the assemblies for the "landing gear" or "kickstands". The clevis on each landing strut assembly ties to swivel joints to be mounted on the servo above. The ideas is that when leaning error gets too great (unrecoverable falling over), or when the 'bot needs to "rest" it can put the landing gear down and balance.
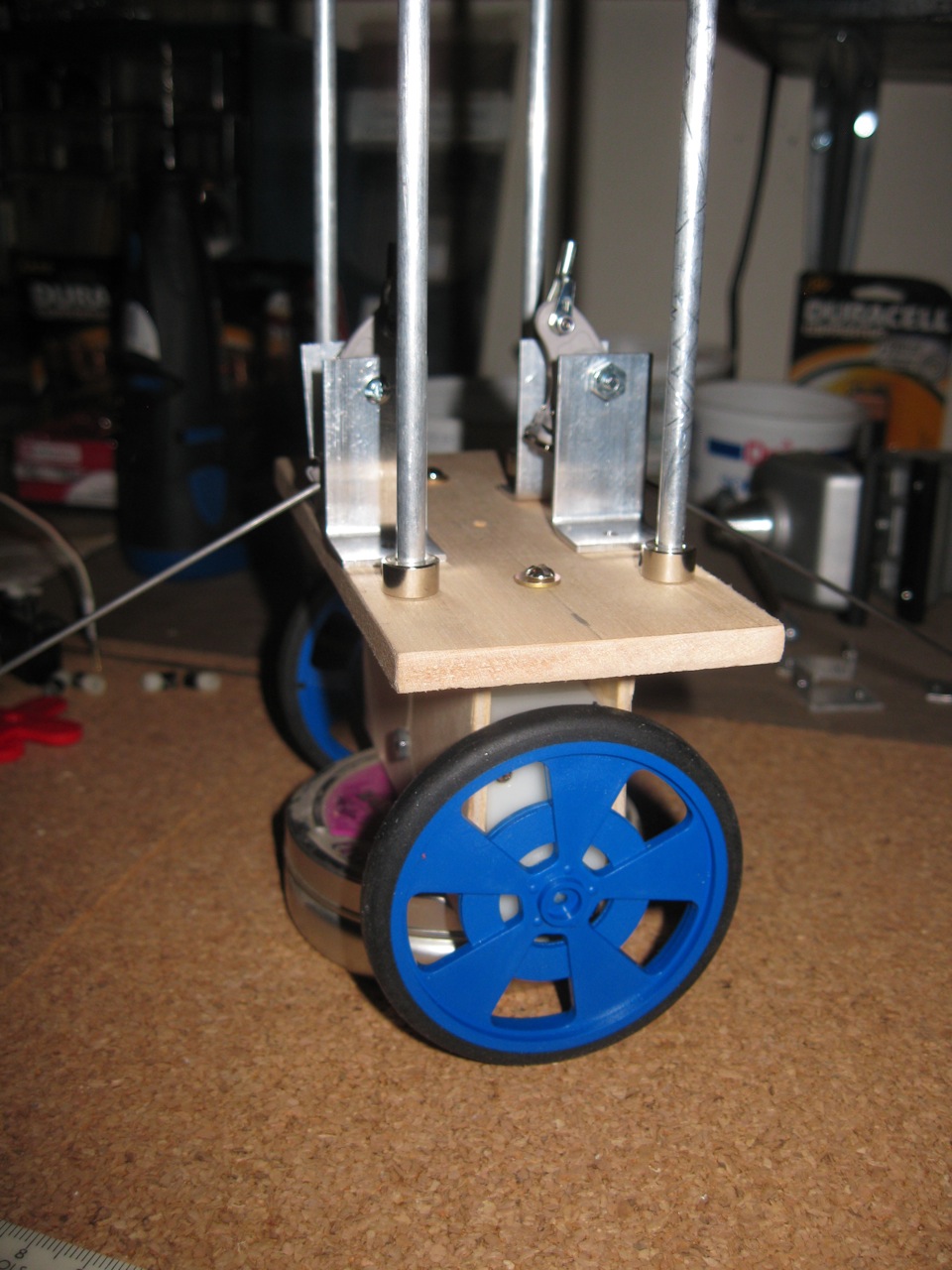
For the curious, for tests, I balance the 'bot on one finger, with my finger right between the wheels under the motor box. Like balancing an upside-down broom on your finger. I figure if I can't easily balance it on my finger, it's gonna be real hard to tune the platform under micro control. In any case, it balances quite nicely.
The motor are Solarbotics right angle gearboxes. I may upgrade these to faster motors if they're not quick enough to balance the 'bot aggressively (you can drop in just faster motors into existing Solarbotics gearboxes -- the pair of new motors runs $3-$4). See this thread: http://forums.parallax.com/showthread.php?121817-Tenacious-A-and-Tenacious-B-twin-robots-hacked-from-Morphibians-SX-powered
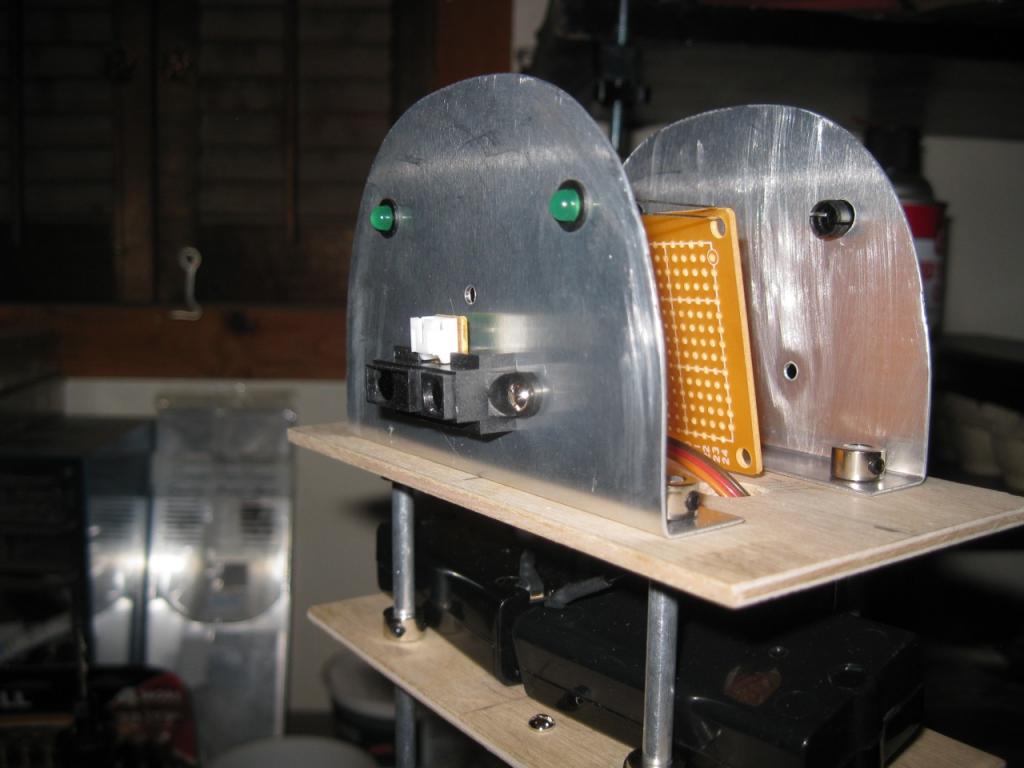
I'll post more next month when I've got full finishing/assembly done and some electronics on board.
The basic materials are aluminum tubing and flats and aircraft hobby plywood. When I disassemble for painting and finishing I'll probably bevel or round of the corners of the horizontal boards for a better, less boxy appearance.
Shown also are the assemblies for the "landing gear" or "kickstands". The clevis on each landing strut assembly ties to swivel joints to be mounted on the servo above. The ideas is that when leaning error gets too great (unrecoverable falling over), or when the 'bot needs to "rest" it can put the landing gear down and balance.
For the curious, for tests, I balance the 'bot on one finger, with my finger right between the wheels under the motor box. Like balancing an upside-down broom on your finger. I figure if I can't easily balance it on my finger, it's gonna be real hard to tune the platform under micro control. In any case, it balances quite nicely.
The motor are Solarbotics right angle gearboxes. I may upgrade these to faster motors if they're not quick enough to balance the 'bot aggressively (you can drop in just faster motors into existing Solarbotics gearboxes -- the pair of new motors runs $3-$4). See this thread: http://forums.parallax.com/showthread.php?121817-Tenacious-A-and-Tenacious-B-twin-robots-hacked-from-Morphibians-SX-powered
I'll post more next month when I've got full finishing/assembly done and some electronics on board.
960 x 1280 - 204K
1024 x 768 - 67K

960 x 1280 - 343K
1024 x 768 - 64K
960 x 1280 - 257K
Comments