

HELP how to make the two Ping ultrasonic rang operate in Bistatic forward scattering
 Jon_kon
Posts: 1
Jon_kon
Posts: 1
Hello :
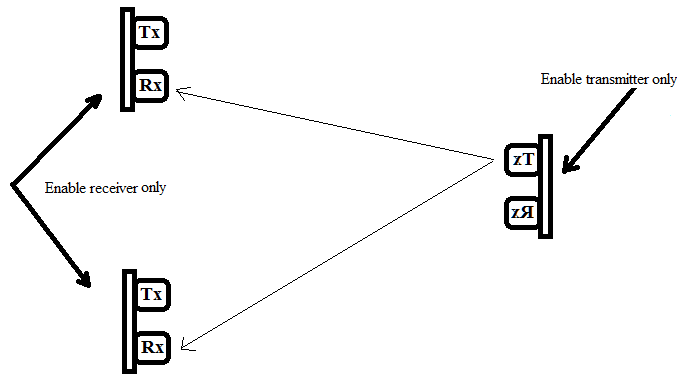
Im currently working on a person following robot and I planning to use three ultrasonic range finder to enable them to be one transmitter and two receiver and then triangulate the respective received distance to enable the robot to track the person .I know that the parallex ultrasonic range finder is working as Monostatic sonar where the Rx and Tx are in the same place
So if anyone can help me with a code which make the module send a ping and other module pick up that ping and report the distance from the sender
The picture tells more
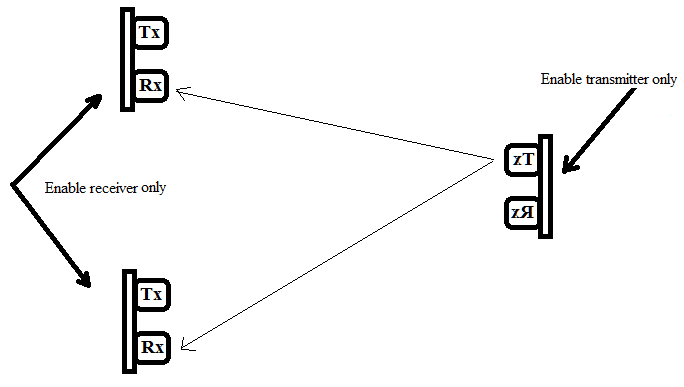
Im currently working on a person following robot and I planning to use three ultrasonic range finder to enable them to be one transmitter and two receiver and then triangulate the respective received distance to enable the robot to track the person .I know that the parallex ultrasonic range finder is working as Monostatic sonar where the Rx and Tx are in the same place
So if anyone can help me with a code which make the module send a ping and other module pick up that ping and report the distance from the sender
The picture tells more
684 x 387 - 12K
Comments
http://forums.parallax.com/showthread.php?120038-IR-augmented-Echo-location-with-the-Ping)))
-Phil