

BoeBot solves the WRO 2011 challenge for secondary School

Hello All,
The most of you probably already know about the WRO competitions organized by Lego Mindstorms.
In this thread I would like to share with you my own solution for the WRO 2011 challenge that concerns the secondary school using my Boe-Bot.
[size=+2]Part1: Introduction [/size]
The challenge for the secondary school demands from the competitors to construct a recycler robot.
The robot must have the ability to sort different colored and sized cubes. There are cubes of 3 colors (red, green and blue) and of two sizes 3cmx3cmx3cm and 5cmx5cmx5cm.
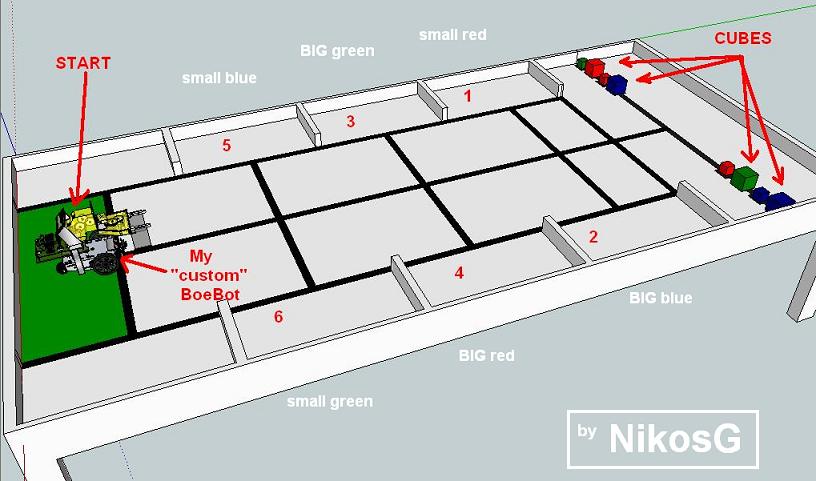
More specifically: First the robot starts from the green area and takes each cube (We don’t know in advance the string of the cubes). Then it must recognize the color and the size of the cube. After that it must put the cube in the appropriate “Bin”. In the photo below I have numbered the “Bins” e.g. 1= for small red cubes, 2=for BIG blue cubes etc.

As all the previous WRO competitions the robot must be able to navigate itself with accuracy and know its position every time.
I have also done the 3d Model of the competition ring using the Google SketchUP software. This model is fairly accurate and its dimensions are according the competition’s rules. In this 3d Model you can also see my “custom” Boe bot and discover all the details of my construction. "(Download the viewer to view 3D files)”
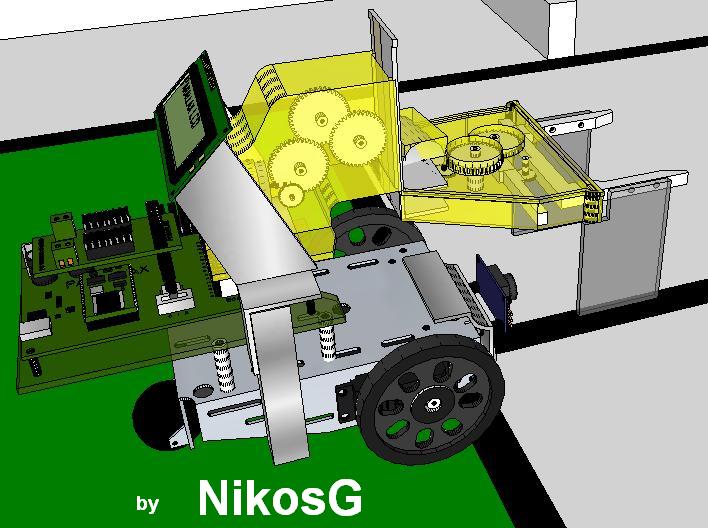
In the Part2 I’ll explain the function of my "custom" BoeBot (see the follow image) and I’ll give some examples and videos according to my hardware.

The most of you probably already know about the WRO competitions organized by Lego Mindstorms.
In this thread I would like to share with you my own solution for the WRO 2011 challenge that concerns the secondary school using my Boe-Bot.
[size=+2]Part1: Introduction [/size]
The challenge for the secondary school demands from the competitors to construct a recycler robot.
The robot must have the ability to sort different colored and sized cubes. There are cubes of 3 colors (red, green and blue) and of two sizes 3cmx3cmx3cm and 5cmx5cmx5cm.
More specifically: First the robot starts from the green area and takes each cube (We don’t know in advance the string of the cubes). Then it must recognize the color and the size of the cube. After that it must put the cube in the appropriate “Bin”. In the photo below I have numbered the “Bins” e.g. 1= for small red cubes, 2=for BIG blue cubes etc.
As all the previous WRO competitions the robot must be able to navigate itself with accuracy and know its position every time.
I have also done the 3d Model of the competition ring using the Google SketchUP software. This model is fairly accurate and its dimensions are according the competition’s rules. In this 3d Model you can also see my “custom” Boe bot and discover all the details of my construction. "(Download the viewer to view 3D files)”
In the Part2 I’ll explain the function of my "custom" BoeBot (see the follow image) and I’ll give some examples and videos according to my hardware.
708 x 528 - 68K

816 x 481 - 61K
Comments
One of the most important parts of this challenge that faces the robot is to recognize simultaneously the color and the size of each cube. For this purpose the robot uses two very popular Parallax sensors: the ColorPAL sensor for the color detection and the PING))) Ultrasonic Sensor for the size detection. In order to put together both sensors and manipulate their data I made an aluminum frame to hold them. The frame with the sensors is adapted in the front side of theBoeBot.
Here is how it works:
Both sensors scan the area in front of the robot. If there is nothing close to the robot the ultra sonic sensor detects a distance d>=4cm (I have measured that a cube is close to the robot and the robot can catch it when its distance from the robot is < 4cm). In the same time the ColorPAL sensor detects the “BLANK”. In this case the robot has nothing to do except to move forward in order to approach a cube.
Supposing the robot approach a small red cube. In this case the ultra sonic sensor will gives us a distance smaller than 4cm. This data indicates that “something” exists in front of the robot. In the same time the ColorPal keeps on detecting the “BLANK”. So we can understand that a small cube exists there. The Basic stamp gives the appropriate command to the gripper (How much the gripper should close in order to catch the cube).
In the next step the gripper grasps the cube and picks it up according the BasicStamp order
As the gripper lifts the cube up the ColorPAL detects the color for another time. Now it can identify that is a small red cube.
Supposing the robot approach a big green cube, the ultra sonic sensor will gives us for another time a distance smaller than 4cm and the ColorPal detects the “green”. So we can understand that a big green cube exists there. The Basic stamp gives the appropriate command to the gripper (At this time the gripper close its parts less because it has to catch a bigger cube).
Finally the gripper elevates the big green cube
We can use the ColorPAL again to assure the cube’s color although it is not necessary for Big cubes.
We use the same method to identify and the rest types of cubes.
Here is the “flow chart“of the algorithm described above:
And here is a video showing the above procedure:
For this purpose you can use a lot of materials like wood, plastic etc. to make your own cubes. Personally ,I suggest cubes from polystyrene and white cardboard. We can easily find those materials from various old packages. We also need some glue, a scissor, a paper knife, a ruler, a pencil, and markers.
First we cut the polystyrene using the paper knife and we create a cube with side slightly smaller than 3 cm. Then using the ruler and the pencil we draw on the cardboard the shape of an open flat cube. Then we must cut the bend cardboard in order to create the cube. Then we put the polystyrene cube inside the cardboard cube and we pour some clue to solidify the cube. Last we use the marker to paint the cube.
Thank you for your encouraging comment! As I’m not very confident with my English, your comment is an indication that my documentation is comprehensible.
@ Martin_H
Actually, the mission of the robot is very cool and intrigues the student’s interest!
I wish I had the original Gripper Kit for the Boe-Bot Robot to try this project but I couldn’t wait to buy one. The gripper you see was given by DeAgostini, a robot magazine that was published here in Greece in 2004.You can also see this Gripper in action here, in another project of mine.
However I strongly believe that the ideal gripper would be the Gripper Kit for the Boe-Bot Robot because it saves a lot of space. As you can see the DeAgostini gripper although functions well is a little bit awkward.
@ Whit and Martin_H
If you notice similar activities and robot missions with colored cubes please post it to me.
Thank you Nikos.