

My robotic farmer, Prospero

Edit: 10-19-2011
I've put together a short video that lays out the argument for and explains my concept of using swarms of robots for farming. Let me know what you think!
New Video: Future of Farming: Prospero Robot Farmer
http://www.youtube.com/watch?v=CReaedEF41w
Edit: 2-14-2011
Now with music!
http://www.youtube.com/watch?v=ACtihXjq2B0
Video of Prospero walking around and planting indoors (it's January in Iowa )
5:04 minutes
Hey all I just got my farming robot done a couple of weeks ago for a contest at Schmart Board and had a little bit of time to post a couple of pictures and video. I'll pull something more together and post that on the "projects" forum.
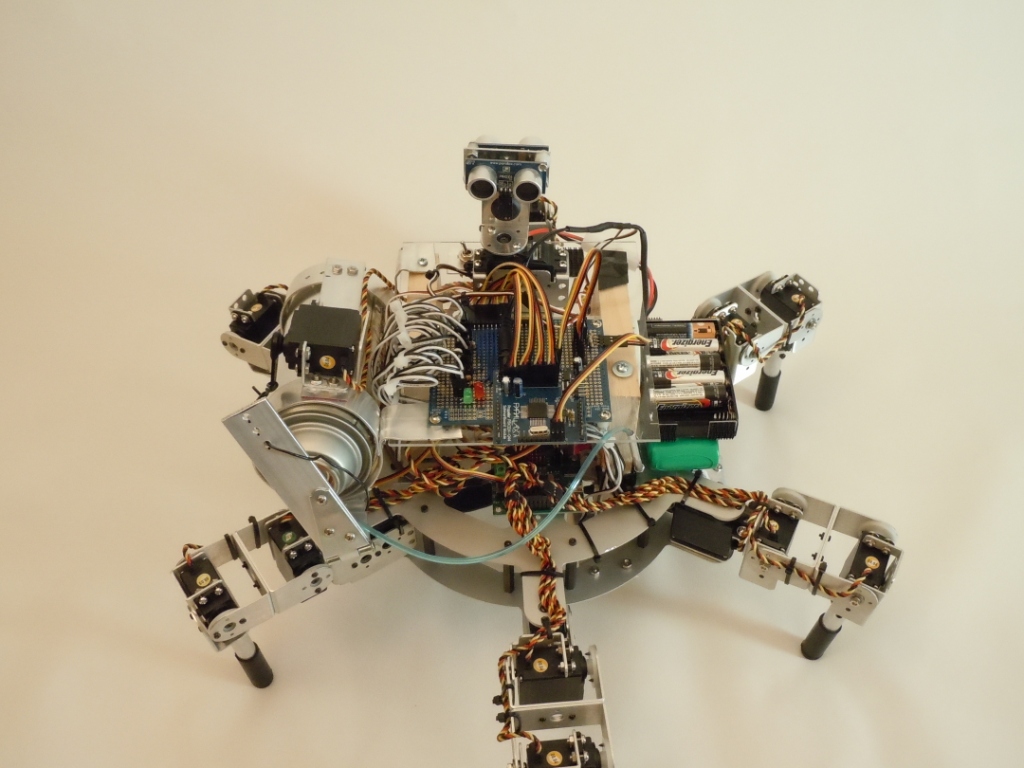
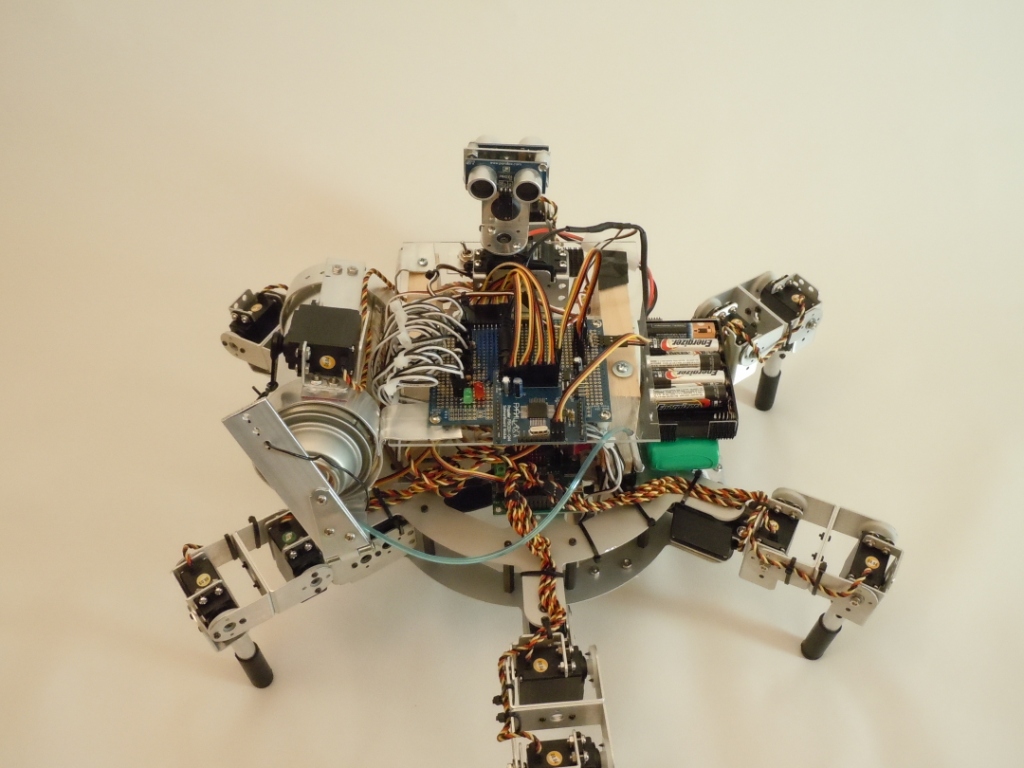
So anyhow, Prospero is an autonomous hexapod that can instantly change directions without turning its body, avoid objects, detect seeds (that it or another robot has planted), plant seeds at a specified spacing, mark/apply a pre-emergent herbicide &/or fertilizer and let other Prospero robots in the area know if it needs help planting seeds in its area or if the area has been planted. It's meant to be deployed as part of a larger group/ swarm and its behavior uses swarm and game theory. I started this project because I began to wonder if the current trajectory of agricultural technology (larger and larger equipment) was the best way to get the maximum productivity out of an acre of land. The current trend is primarily focused at getting the maximum productivity out of the controller, a person riding in a tractor. The problem with using larger and larger machinery is that you lose the resolution that you're able to make decisions at (you're painting with a large brush). You have to make your farming decisions at the field level which increases the yield one person (controller) is able to produce, but this comes at the cost of lower yields per acre. One seed company's slogan is "The right product (seed) on the right acre." So what if we were able to make farming decisions on a foot by foot or plant by plant basis? This would dramatically increase the productivity of the land, but you would also dramatically increase the number of people and the cost of business. This is a problem if you used people, but what about a swarm of simple, inexpensive robots? You can build a lot of robots for the cost of a single quarter-million dollar tractor (and that's not counting the actual equipment or harvester.) Anyhow, that's the idea behind Prospero. I hope you enjoy the videos and let me know what you think!
0:42 minutes
http://www.youtube.com/watch?v=jdEdV-ct1HM
Link to the Schmart Board post with more info including source code and pictures
(you have to log-in to see the files)
http://forum.schmartboard.com/index.php/topic,871.0.html


I've put together a short video that lays out the argument for and explains my concept of using swarms of robots for farming. Let me know what you think!
New Video: Future of Farming: Prospero Robot Farmer
http://www.youtube.com/watch?v=CReaedEF41w
Edit: 2-14-2011
Now with music!
http://www.youtube.com/watch?v=ACtihXjq2B0
Video of Prospero walking around and planting indoors (it's January in Iowa )
5:04 minutes
Hey all I just got my farming robot done a couple of weeks ago for a contest at Schmart Board and had a little bit of time to post a couple of pictures and video. I'll pull something more together and post that on the "projects" forum.
So anyhow, Prospero is an autonomous hexapod that can instantly change directions without turning its body, avoid objects, detect seeds (that it or another robot has planted), plant seeds at a specified spacing, mark/apply a pre-emergent herbicide &/or fertilizer and let other Prospero robots in the area know if it needs help planting seeds in its area or if the area has been planted. It's meant to be deployed as part of a larger group/ swarm and its behavior uses swarm and game theory. I started this project because I began to wonder if the current trajectory of agricultural technology (larger and larger equipment) was the best way to get the maximum productivity out of an acre of land. The current trend is primarily focused at getting the maximum productivity out of the controller, a person riding in a tractor. The problem with using larger and larger machinery is that you lose the resolution that you're able to make decisions at (you're painting with a large brush). You have to make your farming decisions at the field level which increases the yield one person (controller) is able to produce, but this comes at the cost of lower yields per acre. One seed company's slogan is "The right product (seed) on the right acre." So what if we were able to make farming decisions on a foot by foot or plant by plant basis? This would dramatically increase the productivity of the land, but you would also dramatically increase the number of people and the cost of business. This is a problem if you used people, but what about a swarm of simple, inexpensive robots? You can build a lot of robots for the cost of a single quarter-million dollar tractor (and that's not counting the actual equipment or harvester.) Anyhow, that's the idea behind Prospero. I hope you enjoy the videos and let me know what you think!
0:42 minutes
http://www.youtube.com/watch?v=jdEdV-ct1HM
Link to the Schmart Board post with more info including source code and pictures
(you have to log-in to see the files)
http://forum.schmartboard.com/index.php/topic,871.0.html

1024 x 768 - 359K
1024 x 768 - 267K
1024 x 768 - 295K

1024 x 768 - 302K
Comments
-dan
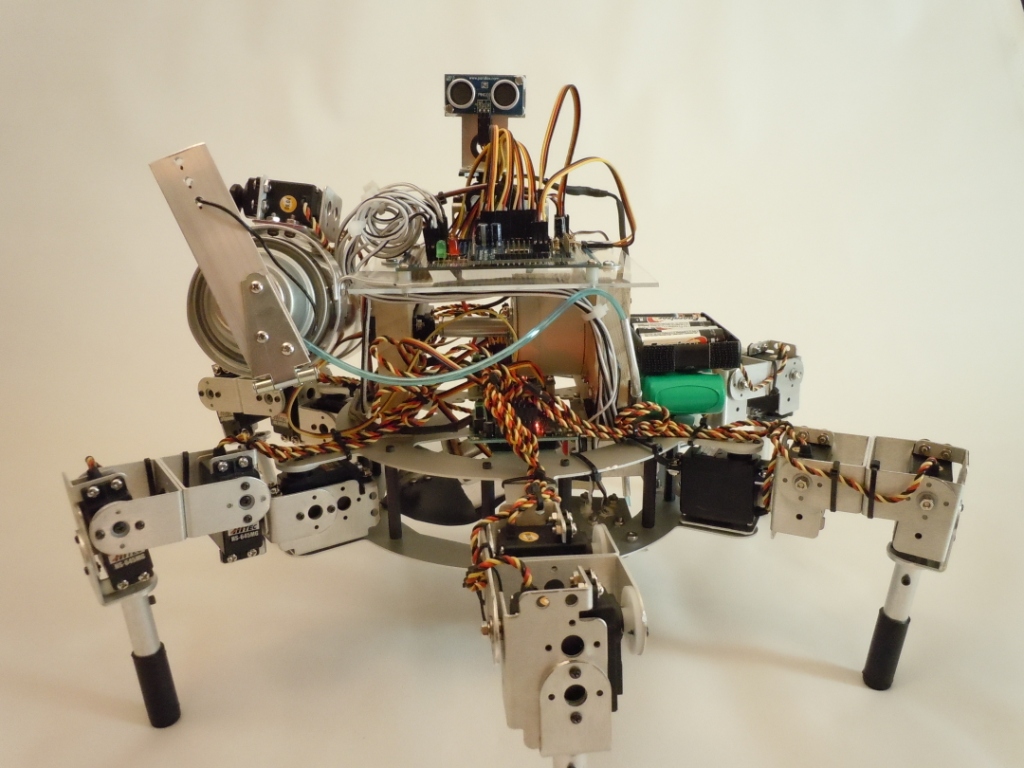
The robot just uses a can of white spray paint to mark the spot where the seed is planted, If you were doing this for real you would probably use IR LEDs and mark the spot with a colorless, custom mixture that would reflect IR and contain whatever pre-emergence applications that you might want. (Polka dot fields probably wouldn't go over so well.) I just used white paint with blue LEDs because made it easy to see what was going on. A powder would have worked just as well.
Dave
My favorite video is the planting seeds and marking their locations. The drill for the holes works great. What I like so much is that it reminds me a planetary explorer robot. I love the stuff NASA does with its robots. This is just as cool, but does something useful right here. Great job!
Give us some warning before you set Caliban loose...
Thanks Erco! Ya, there's two different ways that you can go about it. One way would be to have kind of a central planner that kept track of where everything is. I'd like to build a second robot like that which would have ~3cm2 resolution, but I don't know exactly how to do it without buying a really expensive GPS receiver and base station. It would help in ag research where we plant large fields and track individual plants. Any suggestions or ideas on how to do this kind of triangulation? (It would have to work over a large area.) But with production agriculture you can plant it and "forget" it. However, if you do ever make a gardening plotter like that, I'm going to run for the hills.
Ha ha ha Ya, I'll let you know. I picked the name Prospero because, for the contest, you had to post everything, including the source code which made me think of Prospero's final goodbye and after he's given up all of his magic.
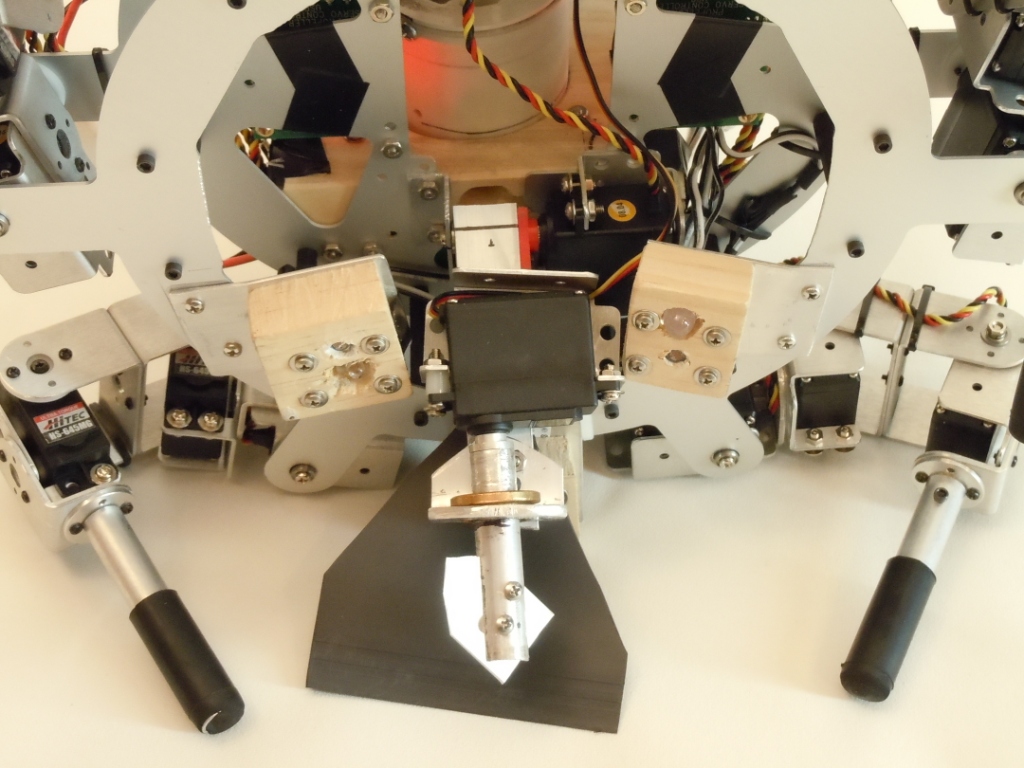
The drill wasn't my favorite solution. Originally I wanted to make Prospero a quadruped that would dig with its feet, but after a couple of months I realized that I needed those really expensive, heavy duty servos and that I would have to make heavy duty servo brackets. So I went back the hexapod design and tried to build a mechanism that would descend, drill the hole, and cover it up in one motion. I worked with Iowa Laser and they helped me, but that ended up being a dead end. (They were very helpful and even converted my hand drawn pictures into CAD drawings. I would recommend them. I mean, how can't Lasers and Robots not go together?
Anyhow, I guess that's why there is always version 2.0...
Below are a couple of pictures of Prospero V0.1 and the part that Iowa Laser made for me that was going to be part of the the digging mechanism, but didn't work out. Anyhow, I still think it looks cool.
Easy to suggest, anyway!
Thanks Humanoide,
Ya, that's exactly what you would want to do, mix a marking agent (probably colorless but reflects IR) with a pre-emergenct mix like a herbicide and fertilizer. Just like a "weed & feed" that you would buy for your lawn.
@ erco
Thats the kind of robot they should have had in "Runaway"
http://www.youtube.com/watch?v=ACtihXjq2B0
5:04 minutes
Where might we find the code. It might help me out on a StingRay project I am looking to complete.
SEL
http://forums.parallax.com/showthread.php?129632-Hexapods-and-Code-for-BS2-BS2sx-and-Propeller-post-your-own
Make sure you let us know how it goes!
Awesome Job!
You could put a light sensor on top to have the thing only plant in areas lit a certain way at certain times of the day. (as some plants require shade or full sun)
What a good and useful example of bringing many components together into a functioning machine.
You could even do soil PH testing while planting to tell the person if soil quality is an issue with plant type.
Way to go, and an neat project!
On a lighter note, I like your signature. My wife and I were at Disney World last summer and Walt Disney's "Keep Moving Forward" really stuck with me and I like seeing the reminder.
I know those mechanisms all too well, I build a dozen aerosol-based flamethrowers a year for gag gifts: http://www.youtube.com/watch?v=NcW4Iovo3zk
You sound like a very interesting person to be around
BTW how does one get on your gag gift mailing list?
Dave
Hard to see in the video, but an infrared remote triggers this sequence: booster motor on, release car to loop for several seconds, trigger the flamethrower, stop the car, turn off booster motor. It resets the car to self-start every time.
And here's one of my tamer gag gifts without fire: http://www.youtube.com/watch?v=fuqZvUBRoBY All mechanical, self indexing, yada yada...
We elves are honored to provide something worthy of being a part of Prospero!
Nice job vanmunch!
-Matt