

Robot Playpen with Rovio So You Can Be "In" It -- was driving live!

We've been working on a little playpen for our communicating smaller 'bots to roam around in. We want folks to be able to interact and "play" with the 'bots, but we don't want them broken, nor we can always have folks physically present.
We had the idea of letting "visitors" drive around the playpen via Rovio (essentially a webcam on wheels that you can drive via http API calls).
We're going to refine the whole thing and have "tasks" and "challenges" -- things that the visitor can accomplish in order to have other fun things happen, for now we're working on basic infrastructure, seeing what works, what doesn't. For example, I had to immediately hack the Rovio to add in LED floodlighting or the floor just isn't visible in the evening with regular room light.
In the final, I think we will present the visitor with two cams -- one from the Rovio, and one overhead cam to give the aerial perspective.
The webpage-based interface seems to work OK with Firefox/Opera and with Explorer, but results in Safari have been spotty.
The webcam in the Rovio will ONLY supply audio in Explorer, not in other browsers. However, given bandwidth limitations, I've found audio to the outside world also spotty.
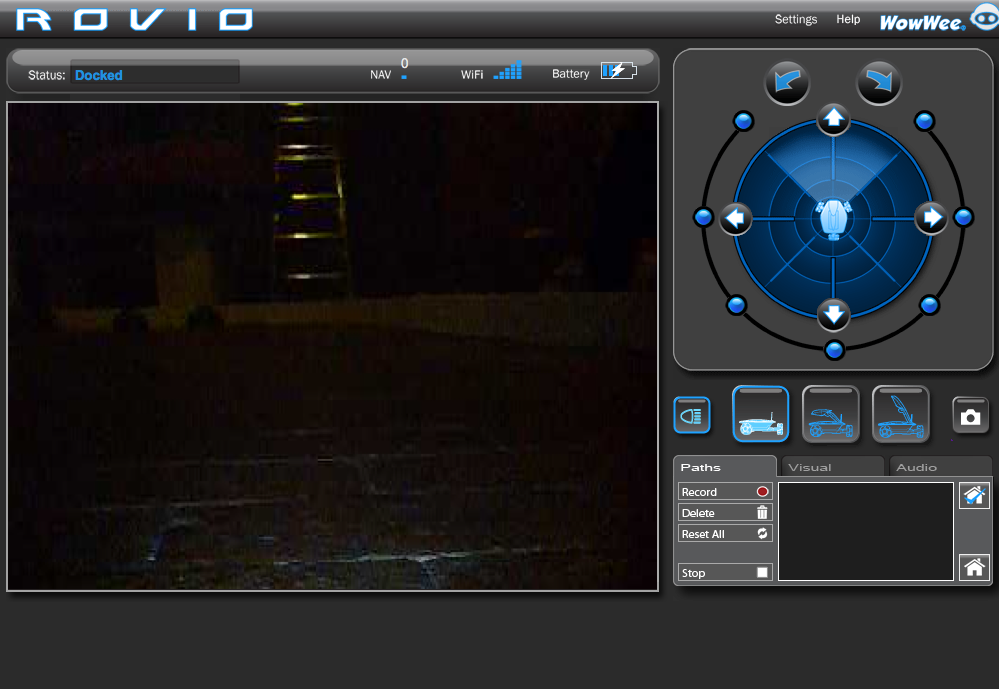
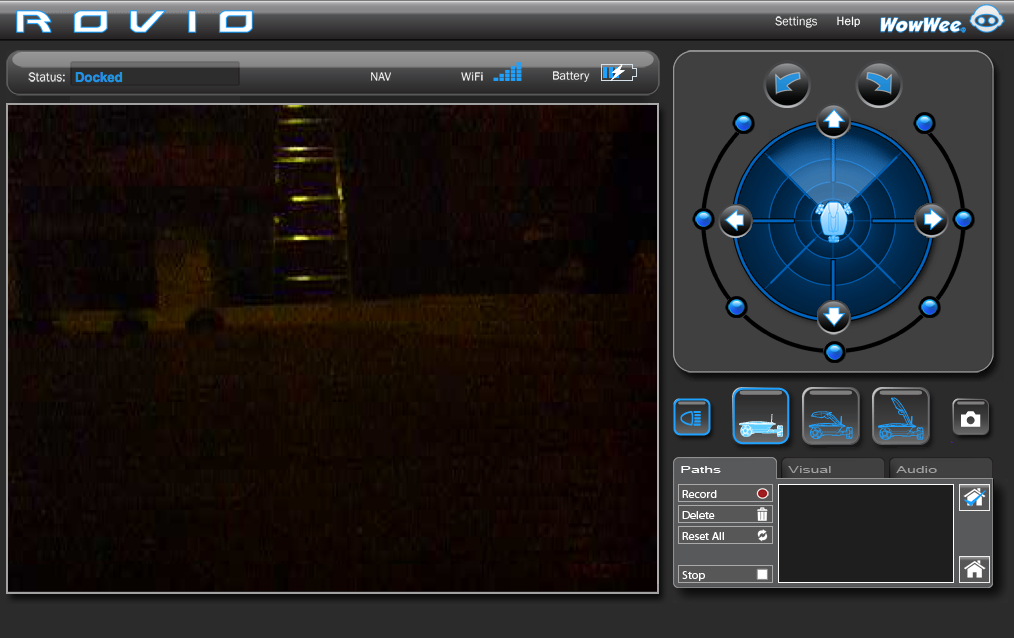
In any case, if anyone wants to drive the Rovio around right now, I've got the ports open from 8:30pm MT to 10:30pm MT tonight, Jan. 5, 2010. See attached for what the embedded, default interface looks like. At this time of day, you really need to turn the headlight on.
Please try it out if you want, and if it doesn't work (i.e. no video), let me know.
Visit:
http://1uffakind.com/robots/centralscrutinizer/
Make sure to turn on the headlight!
If I shut things down early, I'll update this post. Also, I have no idea what happens when more than one visitor attempts to drive the Rovio at once. One of the things on our to-do list is writing our own browser-based front end so that we can manage multiple visitors in a round-robin fashion, leverage built-in obstacle detector of the Rovio, etc.
We had the idea of letting "visitors" drive around the playpen via Rovio (essentially a webcam on wheels that you can drive via http API calls).
We're going to refine the whole thing and have "tasks" and "challenges" -- things that the visitor can accomplish in order to have other fun things happen, for now we're working on basic infrastructure, seeing what works, what doesn't. For example, I had to immediately hack the Rovio to add in LED floodlighting or the floor just isn't visible in the evening with regular room light.
In the final, I think we will present the visitor with two cams -- one from the Rovio, and one overhead cam to give the aerial perspective.
The webpage-based interface seems to work OK with Firefox/Opera and with Explorer, but results in Safari have been spotty.
The webcam in the Rovio will ONLY supply audio in Explorer, not in other browsers. However, given bandwidth limitations, I've found audio to the outside world also spotty.
In any case, if anyone wants to drive the Rovio around right now, I've got the ports open from 8:30pm MT to 10:30pm MT tonight, Jan. 5, 2010. See attached for what the embedded, default interface looks like. At this time of day, you really need to turn the headlight on.
Please try it out if you want, and if it doesn't work (i.e. no video), let me know.
Visit:
http://1uffakind.com/robots/centralscrutinizer/
Make sure to turn on the headlight!
If I shut things down early, I'll update this post. Also, I have no idea what happens when more than one visitor attempts to drive the Rovio at once. One of the things on our to-do list is writing our own browser-based front end so that we can manage multiple visitors in a round-robin fashion, leverage built-in obstacle detector of the Rovio, etc.
999 x 689 - 306K
1014 x 638 - 350K
Comments
At first I thought that al the lights in the room were off, until I saw the ceiling fan with it's lights on. I guess the Rovio's camera just need loads of light to see well. Seeing the centipede robot emerge out of the darkness was surprising.
Rich H
Yes, you must stop to rotate. It's a limitation of the API, but it's good actually, for remote driving -- keeps things a bit safe. You can move sideways and forward at the same, though.