

Assembly Stepper help needed
 T Chap
Posts: 4,260
T Chap
Posts: 4,260
I could sure use some help on this stepper loop. The program takes values from a GUI, and the motor program chases the new position, with ramp up and ramp down on every move. There are two halves to the assembly program, one is for a forward movement and one is for a reverse movement, both include provisions for decelerating during a current move.
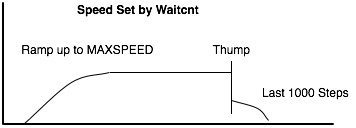
The problem seems to be in Repeat 4 ' Forward Decel (same issue on the Reverse too) which is the point at which a move will start to ramp down over the last 1000 steps. The Ramp down is supposed to start at the same speed it was moving at during the maximum speed of the move, set by MAXSPEED. But what seems to be happening is that the Decel Repeat4 does not pick up at the same speed, but starts it's loop at a slower speed, and an audible 'thump' is heard at the transition. I am not good at assembly, and have tried several attempts to get the repeat4 to use the same speeds for waitcnt but have had no luck. I was hoping someone might see something obvious so that it would be simple to have repeat4 assume the same speed(waitcnt value) and ramp down from there.
Repeat2 is the starting motion repeat loop which includes ramp up. At the end of the Repeat2, it should go to Repeat4 for the final 1000 steps. The idea being that the steps start out at a slow rate(accel) with waitcnt, then the accel value is decreased every loop until the maximum speed is achieved. For the last 1000 steps, the Repeat4 picks up, and it should use the same accel value( or MAXSPEED) and slow from there by increasing the waitcnt amount.
At higher speeds, I think this transition is causing lost steps and a cumulative drift, lower speeds are fine.
Here is the repeat 4. The program is uploaded as well, see the DAT for the problem.
The illustration shows the thump.
The problem seems to be in Repeat 4 ' Forward Decel (same issue on the Reverse too) which is the point at which a move will start to ramp down over the last 1000 steps. The Ramp down is supposed to start at the same speed it was moving at during the maximum speed of the move, set by MAXSPEED. But what seems to be happening is that the Decel Repeat4 does not pick up at the same speed, but starts it's loop at a slower speed, and an audible 'thump' is heard at the transition. I am not good at assembly, and have tried several attempts to get the repeat4 to use the same speeds for waitcnt but have had no luck. I was hoping someone might see something obvious so that it would be simple to have repeat4 assume the same speed(waitcnt value) and ramp down from there.
Repeat2 is the starting motion repeat loop which includes ramp up. At the end of the Repeat2, it should go to Repeat4 for the final 1000 steps. The idea being that the steps start out at a slow rate(accel) with waitcnt, then the accel value is decreased every loop until the maximum speed is achieved. For the last 1000 steps, the Repeat4 picks up, and it should use the same accel value( or MAXSPEED) and slow from there by increasing the waitcnt amount.
At higher speeds, I think this transition is causing lost steps and a cumulative drift, lower speeds are fine.
Here is the repeat 4. The program is uploaded as well, see the DAT for the problem.
The illustration shows the thump.
repeat2
'START FORWARD motion here if new position > current position
'run := LONG[newposition] - LONG[currentposition] NEW position - current position
RDLONG tnew, newposition
RDLONG tcurrent, currentposition
MOV Run, tnew
SUBS Run, tcurrent
RDLONG tMaxSpeed, MaxSpeed
'turn pin on
RDLONG PHSA, pwidth ' <<<<<FIRE PIN FORWARD ACCEL+ RUN
MINS accel, tMaxSpeed
MOV ctmp1, accel
ADD ctmp1, CNT
WAITCNT ctmp1, #0
SUBS accel, arate 'accel - arate to ramp up speed
'
'update position +1
'LONG[currentposition] := LONG[currentposition] + 1
MOV ctmp1, currentposition
RDLONG ctmp2, ctmp1
ADD ctmp2, #1
WRLONG ctmp2, ctmp1
'update accel = accel - arate accelerate motor/loop
'if LONG[newposition] < LONG[currentposition] [[[endif2]]]
RDLONG ctmp1, newposition
MOV ctmp2, currentposition
RDLONG ctmp2, ctmp2
CMPS ctmp1, ctmp2 WC
IF_NC JMP #endif2
MOV rep3cnt, C1000
repeat4 'FORWARD DECEL <<<<<<<<<<<<<<<start ramping down, use same speed to start ramp
'set pin on
RDLONG PHSA, pwidth '<<<< FIRE PIN FORWARD DECEL 1000
RDLONG tMaxSpeed, MaxSpeed
MINS decel, MaxSpeed
MOV ctmp1, decel
ADD ctmp1, CNT
WAITCNT ctmp1, #0 '<<< sets decel ramp rate
ADD decel, drate
'update position by + 1
'LONG[currentposition] := LONG[currentposition] + 1
MOV ctmp1, currentposition
RDLONG ctmp2, ctmp1
ADD ctmp2, #1
WRLONG ctmp2, ctmp1
'update decel rate by drate
DJNZ rep4cnt, #repeat4 'decriment and jump if not 0
356 x 128 - 14K
Comments
Instead of using separate variables for both ACCEL and DECEL, I removed all the DECEL variables and replaced them with ACCEL in the ramp down repeat loop, now it seems to work as it should.