

stepper motors sequences
 SXlee
Posts: 47
SXlee
Posts: 47
Hey guys, trying to drive stepper motors
been on it for 3 days now.
I'm using the SX28.
I know, Ummm.... I think, the sequence for the parallax 12-Volt Unipolar Stepper Motor is some think like:
1 = %1000
2 = %1001
3 = %0001
4 = %0101
5 = %0100
6 = %0110
7 = %0010
8 = %1010
My stepper motors are
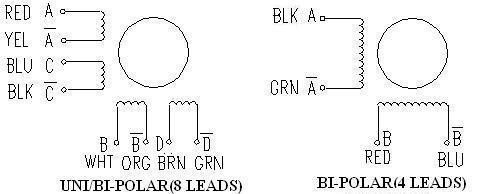
UNI/BI-POLAR(8 LEADS) and BI-POLAR(4 LEADS)
Can some one help with the sequences for my stepper motors or give me a link with some info.

SXlee.
been on it for 3 days now.
I'm using the SX28.
I know, Ummm.... I think, the sequence for the parallax 12-Volt Unipolar Stepper Motor is some think like:
1 = %1000
2 = %1001
3 = %0001
4 = %0101
5 = %0100
6 = %0110
7 = %0010
8 = %1010
My stepper motors are
UNI/BI-POLAR(8 LEADS) and BI-POLAR(4 LEADS)
Can some one help with the sequences for my stepper motors or give me a link with some info.
SXlee.
480 x 194 - 17K
Comments
The SX forum seems a little dead:skull:, is there a thread for stepper motors in parallax forums?
I fond this Full step sequence for the BI-POLAR(4 LEADS): At:
http://members.home.nl/bzijlstra/hardware/stepper/stepper.htm
Is it possible to have a half step-sequence with a Bipolar stepper?
and what would the sequences be for the UNI/BI-POLAR(8 LEADS)?
SXlee.
As far as more info on steppers there is a ton out there on the web:
http://en.wikipedia.org/wiki/Stepper_motor
http://www.imagesco.com/articles/picstepper/01.html
A search on Google brings up some more....
http://lmgtfy.com/?q=stepper motor microcontroller
Hi RobotWorkshop,
I don't have a schematic yet, I was thinking of doing some think like an Dual H-Bridge Configuration.
The code, may-be like this:
Forward inc Position ;new forward location and desired motor coil state call Step ;lookup the new motor state mov port,w ;output the new motor coil state retp ;return to mainline Reverse dec Position ;new reverse location and desired motor coil state call Step ;lookup the new motor state mov port,w ;output the new motor coil state retp ;return to mainline Step mov w,Position ;get the new position and w,#%0000_0011 ;pay attention only to least significant four states add pc,w ;jump into the table and return with the coil combination Table00 retw %0000_0001 ;state 00 return with selected motor coil combination... can be any desired combination Table01 retw %0000_0010 ;state 01 return with selected motor coil combination... can be any desired combination Table10 retw %0000_0100 ;state 10 return with selected motor coil combination... can be any desired combination Table11 retw %0000_1000 ;state 11 return with selected motor coil combination... can be any desired combination 'Code by: Peter (pjv) 'http://forums.parallaxinc.com/forums/default.aspx?f=7&m=147178I would like full, 1/2, 1/4, & 8th Microstepping Resolution for the UNI/BI-POLAR(8 LEADS) and BI-POLAR(4 LEADS).
I thought I'd look in to the sequences be for looking in to the schematic for outputting sequences, but the more I learn, the more I realize what I don't know.
The first two links are very good, they expanded my knowledge a lot, the third I liked, but been searching on Google 4days now.
Thank you for your time and links, much appreciated.
Regards, SXlee.
What would a "Half Step" look like?
and what would the Full step sequences be for the BI-POLAR(8 LEADS)?
any ideas please, someone........
SXlee.
I found a couple other sites that seemed to show a half-step sequence for these motors. Hopefully they will help:
http://www.stepperworld.com/Tutorials/pgBipolarTutorial.htm
http://www.piclist.com/techref/piclist/jal/drivingbipolarsteppermotors.htm
http://www.doc.ic.ac.uk/~ih/doc/stepper/control2/connect.html
http://www.8051projects.net/stepper-motor-interfacing/step-sequence.php
Robert
Thanks for the reply's Robert
The links, all of them were very help-full.
I learnt a lot, and the 4 LEADS motors sequence is resolved for me.
I may not of found those links if it wasn't for you, so,
Thank you so much!!!.
I'm thinking it may be a good idea to kick this thread down to the Sandbox,
should I start a new thread? in the Sandbox?, It may/would, help others there.
:idea:Parallax Forums could do with a Public Forum "motors".:idea:
SXlee.
' {$STAMP BS2}
' {$PBASIC 2.5}
' Bipolar stepper motor drive code for DFRobot Dual H-Bridge V1.3 with a Parallax BS2.
' Stepper tested is Sciplus.com 2.4v, 1.8A 1.8Deg per step.
' Motor controller logic supply from BS2
' Motor Supply, (3) "D" Dry cells in series.
' This program uses about 7% of the BS2 ram.
'
'M1 and M2 select the direction of current flow
'E1 and E2 activate the current to the coils in the stepper.
'VD (logic supply) on motor controller connects to VDD (+5v) on the stamp.
'GND on motor controller connects to VSS (-) on stamp AND if you are
' using seperate motor supply, ground that at GND too.
'VS on motor controller connects to (+) of the motor supply you use.
'
'Pull the jumper "VD=VS" IF you are using a separate motor supply.
'I just hang the jumper ON one of it's pins so not to loose it.
'
'My motor supply is 3 D batts in series, even though my stepper is rated 2.4V,
'the controller needs about 4.5 to run the H Bridge circuitry.
'
'I/O pins are used to control direction and activation of the motor controller.
'Select any actual pins you wish just below after the CON statement.
P VAR Byte 'pause time between steps in ms
PB VAR Byte 'return pause time between steps
directiona CON 0 'pin 0 on BS2 connects to M1
directionb CON 1 'pin 1 on BS2 connects to M2
activea CON 2 'pin 2 on BS2 connects to E1
activeb CON 3 'pin 3 on BS2 connects to E2
X VAR Word 'just a variable for the loops below
P=50 'change this dwell time for a slower step rate. 5 is the least dwell that worked.
PB=5 'reverse rotation dwell time
AGAIN: 'Reference point to repeat the following forward/reverse cycle.
LOW 0
LOW 1
LOW 2
LOW 3
FOR X = 1 TO 50 'this is one revolution on a 1.8 deg stepper
'*******************************
'Note the sequence of directiona and directionb steps the motor forward or reverse
'Clockwise or Counterclockwise may depend on your actual connections
'Coil A and coil B leads can be deterimined by shorting two leads of the stepper
'with a paperclip or jumper wire.
'the motor will become hard to turn. Thus you can identify each coil's set of leads.
'*******************************
'1
LOW directiona
LOW directionb
HIGH activea
HIGH activeb
PAUSE P
LOW activea
LOW activeb
'2
HIGH directiona
LOW directionb
HIGH activea
HIGH activeb
PAUSE P
LOW activea
LOW activeb
'3
HIGH directiona
HIGH directionb
HIGH activea
HIGH activeb
PAUSE P
LOW activea
LOW activeb
'4
LOW directiona
HIGH directionb
HIGH activea
HIGH activeb
PAUSE P
LOW activea
LOW activeb
NEXT
PAUSE 1000
'SECOND HALF
FOR X = 1 TO 50 'REVERSE ROTATION, NOTE SEQUENCE OF directiona and directionb in the steps.
'1
LOW directiona
HIGH directionb
HIGH activea
HIGH activeb
PAUSE PB
LOW activea
LOW activeb
'2
HIGH directiona
HIGH directionb
HIGH activea
HIGH activeb
PAUSE PB
LOW activea
LOW activeb
'3
HIGH directiona
LOW directionb
HIGH activea
HIGH activeb
PAUSE PB
LOW activea
LOW activeb
'4
LOW directiona
LOW directionb
HIGH activea
HIGH activeb
PAUSE PB
LOW activea
LOW activeb
NEXT
PAUSE 1000
GOTO AGAIN
END