

Encoder wheel with 36 position > 72

Hello.
I have a question about the Motor Mount and Wheel Kit with Position Controller, this controller have an encoder wheel with 36 position per revolution, approx. 0.5 inch resolution.
Now is my question can I make a encoder wheel with 72 position per revolution to make ¼ inch resolution? and wil this work!?.
I have a question about the Motor Mount and Wheel Kit with Position Controller, this controller have an encoder wheel with 36 position per revolution, approx. 0.5 inch resolution.
Now is my question can I make a encoder wheel with 72 position per revolution to make ¼ inch resolution? and wil this work!?.
800 x 534 - 19K
Comments
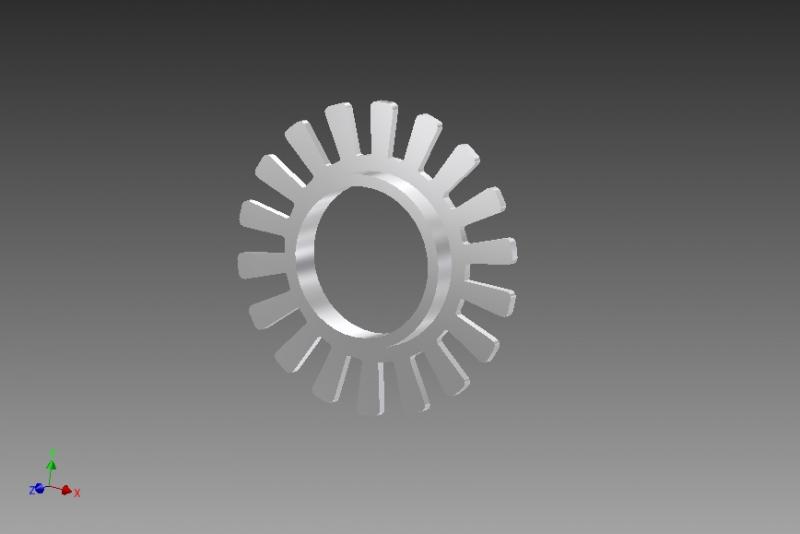
AFAIK, this is a quad encoder (2 optical sensors). Thus the stock 9-slot unit gives 9x4=36 PPR. So yes, your proposed 18-slot disk will yield 72 PPR, provided the slots & tabs don't get smaller than the optical sensor can read. For reliability, you want a 50-50 duty cycle output from the optical sensors. That is, the angular rotation of the on & off segments are equal.
Here's an illustration:
-Phil
pvdb: You're a hacksaw and some superglue away from a 72 PPR quad encoder!
Also true that quad encoders give speed & direction. I had fabulous results (accuracy and repeatability) on Retrobot with just 36 PPR using not a quad encoder, but one optical sensor, which according to Wikipedia is called a tach sensor, not a real encoder. A tach sensor does not give direction, but is faster & easier to read than a quad encoder. In most robot applications, it's pretty dang easy to guess the direction of rotation, isn't it?
BTW, What Capt. Quirk is suggesting could be thought of as a phase locked loop with a frequency divider. This would very difficult to implement, due to the possibility of rapid accelerations and decelerations.
-Phil