

Controlling a motor with two potentiometers
 velociostrich
Posts: 40
velociostrich
Posts: 40
I have a project that I'm working on (well, still planning anyway) that requires a short linear motion that could be achieved with a solenoid, but as the only ones I could find that were the right size were rather expensive, and would require some relatively complex driving circuitry, I've tried to think of a way to do the same with readily available parts. The solution I've thought of involves the use of a motor that in some way either drives a cam that pushes a rod, or turns a threaded shaft that then moves a threaded tube around it, or perhaps by some other means produces a short (about 1/8"), linear stroke. Anyways, I thought about having a linear potentiometer control the rotation of a motor to a specific angle by hooking up a potentiometer to the shaft of the motor, and wiring both in parallel. Both would act as voltage dividers, and the potential difference between the wipers of the two would, I hypothesized, make the motor turn until its own rotation turned the potentiometer attached to the shaft enough that its resistance equalled the linear pot and the potential difference between the two was zero. So naturally, I tried making such a circuit with what parts I had, testing the potential difference between wipers with my digital multimeter, and found my hypothesis was, seemingly, correct. Excited, I attached a small DC motor to the circuit... and it didn't turn. I checked the circuit again and found that there was no current between the wipers. Am I doing something wrong, or is my idea flawed? Or is there some other way of achieving this? I've made a schematic and attached it illustrating the circuit I tried.
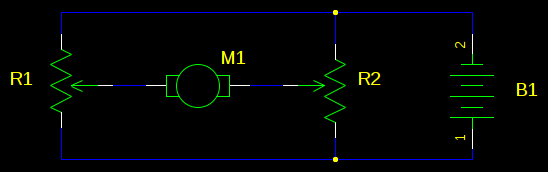
548 x 172 - 4K
Comments
Better idea: use a pot to drive a servo 180 degrees, and put a gear on the servo output, which drives a rack for linear motion. Very efficient. You can use a Stamp or build a "servo tester" circuit to control the servo using a 5K or 10K pot.
If you want to start out trying to build your own hbridge, you will learn a lot but there is a learning curve and frustration factor going that route. It all depends on what your goal is, if you just need to get the project up as fast as possible, buy an off the shelf stepper bipolar driver and hook a Prop up to it and your are in business.
gearhead motor for desired speed of linear action, stepper only if extreme precision needed.
cheaper, i would think, than using pots that can handle power.