

Attempt at triangulation

I wanted to share my first bit of success with my bot / beacon positioning efforts.· I’ve posted some pics,and a link of an odometry test and a positioning demonstration.· As you can see, it’s riddled with problems, but to me it’s still a success.
I had been working on odometry and dead reckoning for quite some time now.· Ultimately I wanted to have a roving bot that could navigate a given area such as inside my home or in my yard and find it’s own charging station, but wasn’t sure how it accomplish it.· I was inspired by Phil Pilrim’s post where he demonstrated a method of using the ping and IR to determine distance to a beacon, and suggested a method of triangulation.
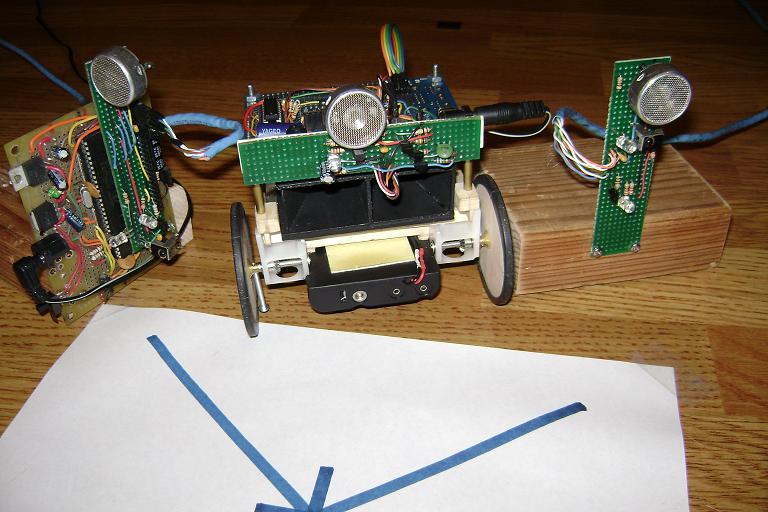
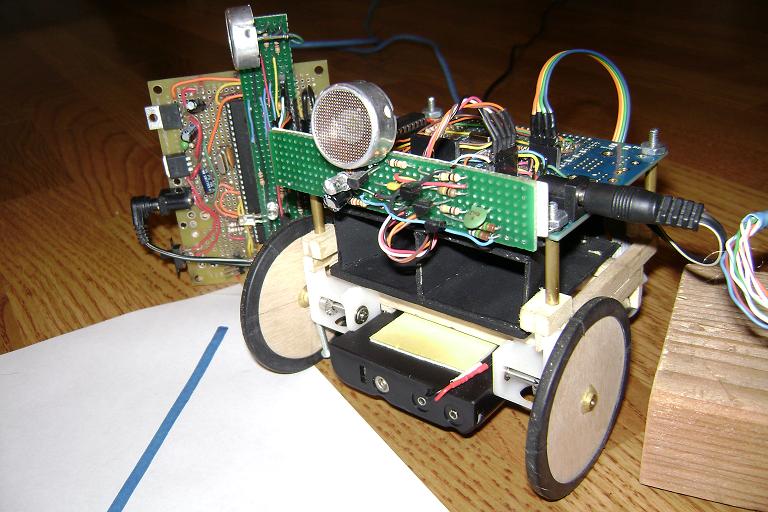
I built my bot out of wood, two Faulhaber motors, and a prop.· I used another prop to control, 2 teathered beacons, some IR components, and transducers from All Electronics.· After I get some of the kinks worked out of this bot I plan to build a larger bot for outdoor navigation.· I would like to use RF instead of IR to trigger the sonar measurements.
Odometry test··· ·http://www.youtube.com/watch?v=loewiQn3VXw
Positioning······ http://www.youtube.com/watch?v=BWFDocLw_8M
I had been working on odometry and dead reckoning for quite some time now.· Ultimately I wanted to have a roving bot that could navigate a given area such as inside my home or in my yard and find it’s own charging station, but wasn’t sure how it accomplish it.· I was inspired by Phil Pilrim’s post where he demonstrated a method of using the ping and IR to determine distance to a beacon, and suggested a method of triangulation.
I built my bot out of wood, two Faulhaber motors, and a prop.· I used another prop to control, 2 teathered beacons, some IR components, and transducers from All Electronics.· After I get some of the kinks worked out of this bot I plan to build a larger bot for outdoor navigation.· I would like to use RF instead of IR to trigger the sonar measurements.
Odometry test··· ·http://www.youtube.com/watch?v=loewiQn3VXw
Positioning······ http://www.youtube.com/watch?v=BWFDocLw_8M
768 x 512 - 88K
768 x 512 - 91K
Comments
I wish I could put one on my mother in law's car - when she got within a mile of my house, the car would automatically take her to the land fill instead.
Safely, of course.
Thanks for sharing your stuff - very nice
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
erco
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
http://www.philohome.com/sensors/lasersensor.htm· check the last link & video. There's room for improvement!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Thanks for the link.· I haven't given any serious thought·to lasers.· I'll have to look into it.
Thanks for all the replys.
Great work!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent!
Send $1 to CannibalRobotics.com.