

Robot's, Robot's, Robot's.

Robot members,
It's time to show your stuff !
With so many threads on projects, questions and well I'm just stuck here and need help with my robot.
I thought it was time to post a thread on Robot's or Robot updates.
At this time I accutally had two ideas.
1. Post a pic. of your favorite robot that you have built current or in the past.
Don't forget to leave a small description with it.
2. Post a pic. with a small description on you current robot project, "and it doe's not have to be completed".
It can describe where you are in the project and where you want to go with it.
What do you think ?
So take that pic. of your project in progress or you favorite robot and share it !

Here is my first robot built in 07. My Ping-Bot.
First attempt at robotics, Thanks Parallax. After building this one I was hooked.
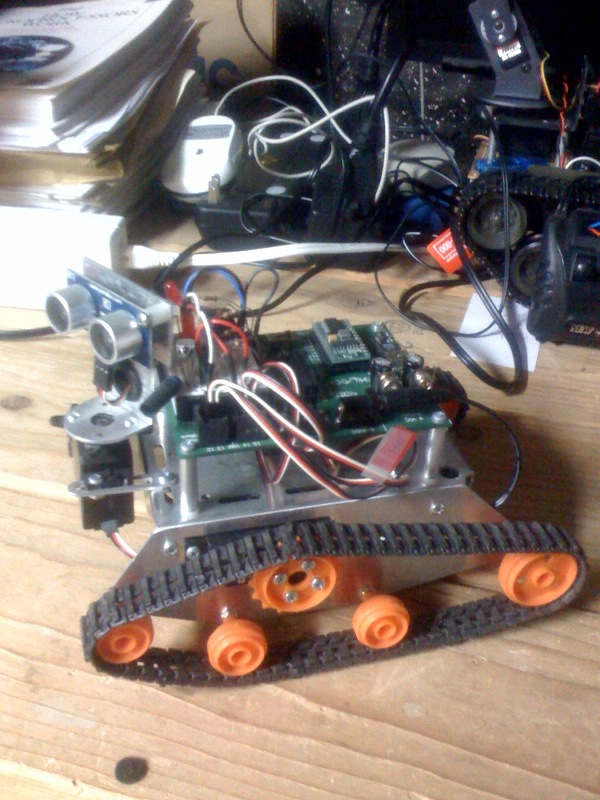
Pic. number two is off my Spy-Bot 08
I wanted to upgrade it to a larger platform, and put an arm on it, that small upgrade project will have to wait, I first wired it to a RF controller, latter I upgraded it to
an EB500, and then the Easy Blue-tooth.
I like the easy Blue-tooth model it is easer to use.
I am currently interfacing it to run with VB, never worked with that before, I'm learning.
It's time to show your stuff !
With so many threads on projects, questions and well I'm just stuck here and need help with my robot.
I thought it was time to post a thread on Robot's or Robot updates.
At this time I accutally had two ideas.
1. Post a pic. of your favorite robot that you have built current or in the past.
Don't forget to leave a small description with it.
2. Post a pic. with a small description on you current robot project, "and it doe's not have to be completed".
It can describe where you are in the project and where you want to go with it.
What do you think ?
So take that pic. of your project in progress or you favorite robot and share it !
Here is my first robot built in 07. My Ping-Bot.
First attempt at robotics, Thanks Parallax. After building this one I was hooked.
Pic. number two is off my Spy-Bot 08
I wanted to upgrade it to a larger platform, and put an arm on it, that small upgrade project will have to wait, I first wired it to a RF controller, latter I upgraded it to
an EB500, and then the Easy Blue-tooth.
I like the easy Blue-tooth model it is easer to use.
I am currently interfacing it to run with VB, never worked with that before, I'm learning.
600 x 800 - 163K
800 x 600 - 154K
Comments
The most talked about: http://cannibalrobotics.com/laserthing.htm
One that I'd like to do again: http://cannibalrobotics.com/Photo_ralph.htm
Has generated the most rumors about me: http://cannibalrobotics.com/Case.htm
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent!
Send $1 to CannibalRobotics.com.
Are you using the original gearbox / motors ?· I found them a little too fast for robot use, they need gearing down some.
You can see the details at this link.
Any Roboters who haven't found the LMR website,· it's definatley worth a look, soem very clever ideas / people there.
http://letsmakerobots.com/node/16610
I am using the original gearbox and motors and tweaked the (2) HB-25 Motor controllers to control the speed.
I had three objectives I wanted to learn while building this robot.
#1 Blue-Tooth communication.
#2 Wireless video
#3 VB control , I am working on that now.
I also wanted to learn more about these systems and how they worked.
I would like to build my next platform with the propeller, not there yet !
Like your project very much !
Post Edited (Rob7) : 3/5/2010 12:13:55 AM GMT
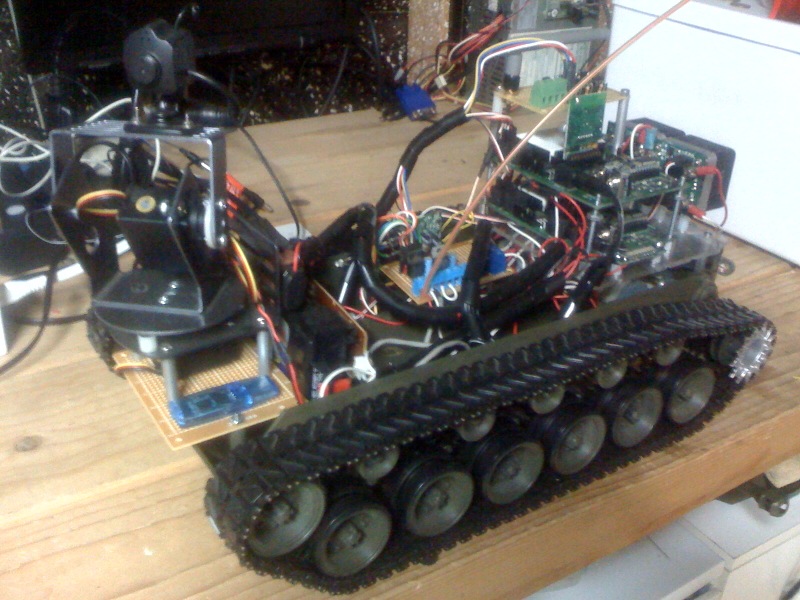
I feel that I'm 80% there.· I'm using the MSR1 board, and the on-board H bridges.· And I'll be putting some updates on LMR soon.
Good to see another tank bot out there.
Cheers.
Great project. Keep us posted on your progress.
How do you like working with the HMC6352 compass ?
Post Edited (Rob7) : 3/5/2010 2:51:16 PM GMT
Lets just say that accurate reults are obtainable, but there is a lot of work required.· I believe this would be·the same for any hobby-grade compass.
I'm aiming for 1 deg accuracy.·· Still working on it.·
Cheers
1 degree, that's great.
That should get you into and out of tight places.
It would be fun to test that with a maze or a type of navigate routine.
This bot has been in development for a long-long-long time. It was meant to bring to a party and have people that couldn't make it log in and virtually attend.
on the computer, we use skype and roborealms. roborealms serves a web page for interaction and handles the moving cameras, Skype has the onboard stationary camera.
On the robot side I have a Parallax servo controller, 2 motor controllers from picobotics (now defunct), 2 540 motors on a 3 stage planetary gear set further reduced by a lawn mower gear train. It is really slow, but can haul around an 80lb deep cycle battery for multi day partying. The bumpers are hooked to the limit switch pins on the motor controller. It now has a couple of web cameras now so you can cycle through them and check for obstructions as you move.
This is my only robotics platform for now. I plan on adding a ping, compass, encoders, ADC for battery voltage, sensing of what bumper is actually depressed, and possibly a GPS once I better understand how to get the propeller to do all of these things at once AND talk to roborealms so it can overlay them on the screen or update a web page with this information.
After this, maybe add a little coarse correction into the mix if roborealms is informed that your going down the hallway or something.
Edit: and, oh yeah, it can fire missiles at people. but then you have to beg to be reloaded.
This is my first post to this forum, maybe time to let you see my robotic project.
Five months ago i planned to make a two wheeled balancing platform.
I wanted to make something with a unused asus eeepc, two usb i/o cards, imu sensors (adxl203,adxrs300), home brew motor drivers and some nimh batteries.
And this is the first result of my work: (my kids call it bliepbot)
I have some problems with finding motors.
On the video i use cheap chinese motors bought on ebay. (lot of sound, to many backlash, no encoders).
Later i tried emg30 motors. (unsuccessfull, plastic gearwheels broke on tuning pid).
Now i ordered the 'Parallax Motor Mount and Wheel Kit with Position Controller' via a local vendor.
I am looking forward on recieving the Kit and maybe i make some more posts on this forum in the future.
regards frank,
Virtual robot, nice !
I like that idea .
Thank's for sharing Frank.