

2 axis pan and tilt precision head + record and playback capabilities. First ap

Hi all from Barcelona!!!
I think, I´m ready for trying to explain (as good as my english level let me) what I´m trying to do as first project with my brand new propeller demo board.
Well, here I go:
I want to build a 2 axis pan&tilt head for a videocamera.
I have seen tons of hobby-servo pan&tilt units but i´m looking for something more accurate that can stop and start moving smoothly. I know that it can be done with dc motors and a joystick or any other potentiometers, but what really interest me is to record and playback the motor acceleration and position for repetitions and playback of stored moves with precision.
What mean is exactly that:
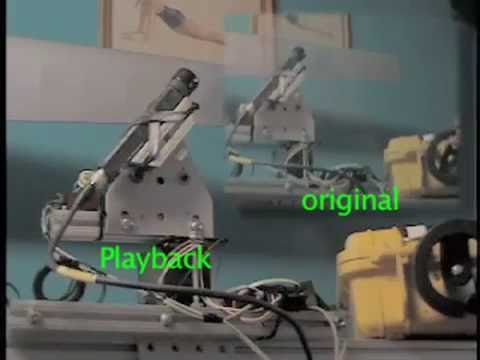
The control board used for the video is a professional and expensive Kuper Control board driving 2 stepper-motors powered and controlled by 2 gecko drives (common drivers for CNC machines).
Another video of something similar done with arduino:

I have been reading about encoders (incremental&absolute), dc motors, steppers, PWM, PID, closed loop configurations,... It seams that there is a lot of ways for doing something like thi but, my "hobby" electronic skills are not as good to decide a first approach. I´m a bit confused at this time and I don´t know how to start. I know that arduino is not powerful enough to manage more than 1 motor at once and record the encoder readings at the same time but I´m sure propeller can.
any ideas for doing something similar?
What kind of motors and encoders can I use?
Where to start!!!!???
thanks guys!
I think, I´m ready for trying to explain (as good as my english level let me) what I´m trying to do as first project with my brand new propeller demo board.
Well, here I go:
I want to build a 2 axis pan&tilt head for a videocamera.
I have seen tons of hobby-servo pan&tilt units but i´m looking for something more accurate that can stop and start moving smoothly. I know that it can be done with dc motors and a joystick or any other potentiometers, but what really interest me is to record and playback the motor acceleration and position for repetitions and playback of stored moves with precision.
What mean is exactly that:
The control board used for the video is a professional and expensive Kuper Control board driving 2 stepper-motors powered and controlled by 2 gecko drives (common drivers for CNC machines).
Another video of something similar done with arduino:
I have been reading about encoders (incremental&absolute), dc motors, steppers, PWM, PID, closed loop configurations,... It seams that there is a lot of ways for doing something like thi but, my "hobby" electronic skills are not as good to decide a first approach. I´m a bit confused at this time and I don´t know how to start. I know that arduino is not powerful enough to manage more than 1 motor at once and record the encoder readings at the same time but I´m sure propeller can.
any ideas for doing something similar?
What kind of motors and encoders can I use?
Where to start!!!!???
thanks guys!
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
- Stephen
I don´t know why, but I´m thinking about dc motors. They are cheaper, have more torque and less "cogging" effect at low speeds. The problem is finding the correct encoder for a closed loop configuration. No idea here!
What do you think about this dc-motor driver??:
http://www.solutions-cubed.com/solutions cubed/MOTM3.htm
I know that professional motion control systems use incremental encoders for dollie moves, but I´m pretty sure that they don´t in rotations. No end switch, I think.
Here I paste some lines of a guy asking for the track motor encoders in a motion control forum ( http://www.mocoforum.com/cgi-bin/discus/discus.cgi ):
"...Does that mean Milo does not measure an absolute position on the tracks but rather a relative motor position?...
...Yes, the incremental encoder is fed into a counter (12 bit) and this is read by the software to maintain and absolute position (32 bit). Zeroing is done off a magnetic proximity switch or by setting it directly once the rig is moved to a know position. The switch is usually in the middle so you don't have to go all the way to one end!..."
Does it mean that I need optical absolute encoders for pan&tilt?
Can you point me to somewhere in internet that sells optical encoders of this kind?
Thanks again.
I manage to make Dc servo motor to turn with an Incremental encoder, but haven't figured out the playback bit.
http://www.youtube.com/watch?v=U-mwTGZAcr4
Freddy