

Pan & Tilt for the Stingray? Why not!
 Chris Savage
Parallax EngineeringPosts: 14,406
Chris Savage
Parallax EngineeringPosts: 14,406
Alex over at Crust Crawler was testing his S3 Pan/Tilt with a camera on the Stingray and we're all happy to report it mounts and works great!· Attached are some pictures.· Enjoy!·
Don't forget...on the horizon are some wheel encoders and eventually a line follower for the Stingray as well.· And currently development continues on a gripper for the Stingray!· Yes, you heard me right...I did say gripper.·")
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Engineering
Check out the new Savage Circuits TV!
Don't forget...on the horizon are some wheel encoders and eventually a line follower for the Stingray as well.· And currently development continues on a gripper for the Stingray!· Yes, you heard me right...I did say gripper.·
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Engineering
Check out the new Savage Circuits TV!
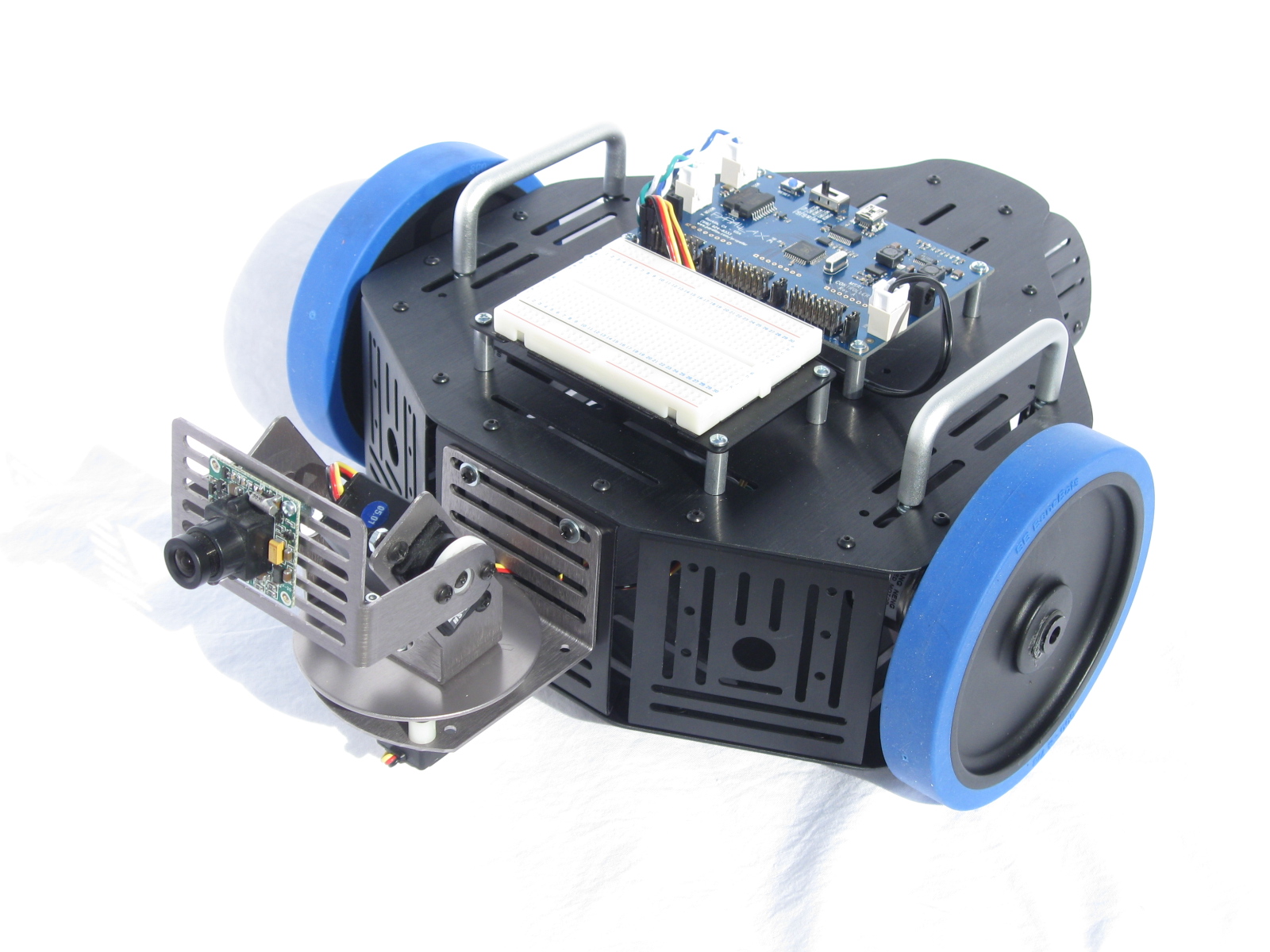
1600 x 1200 - 480K
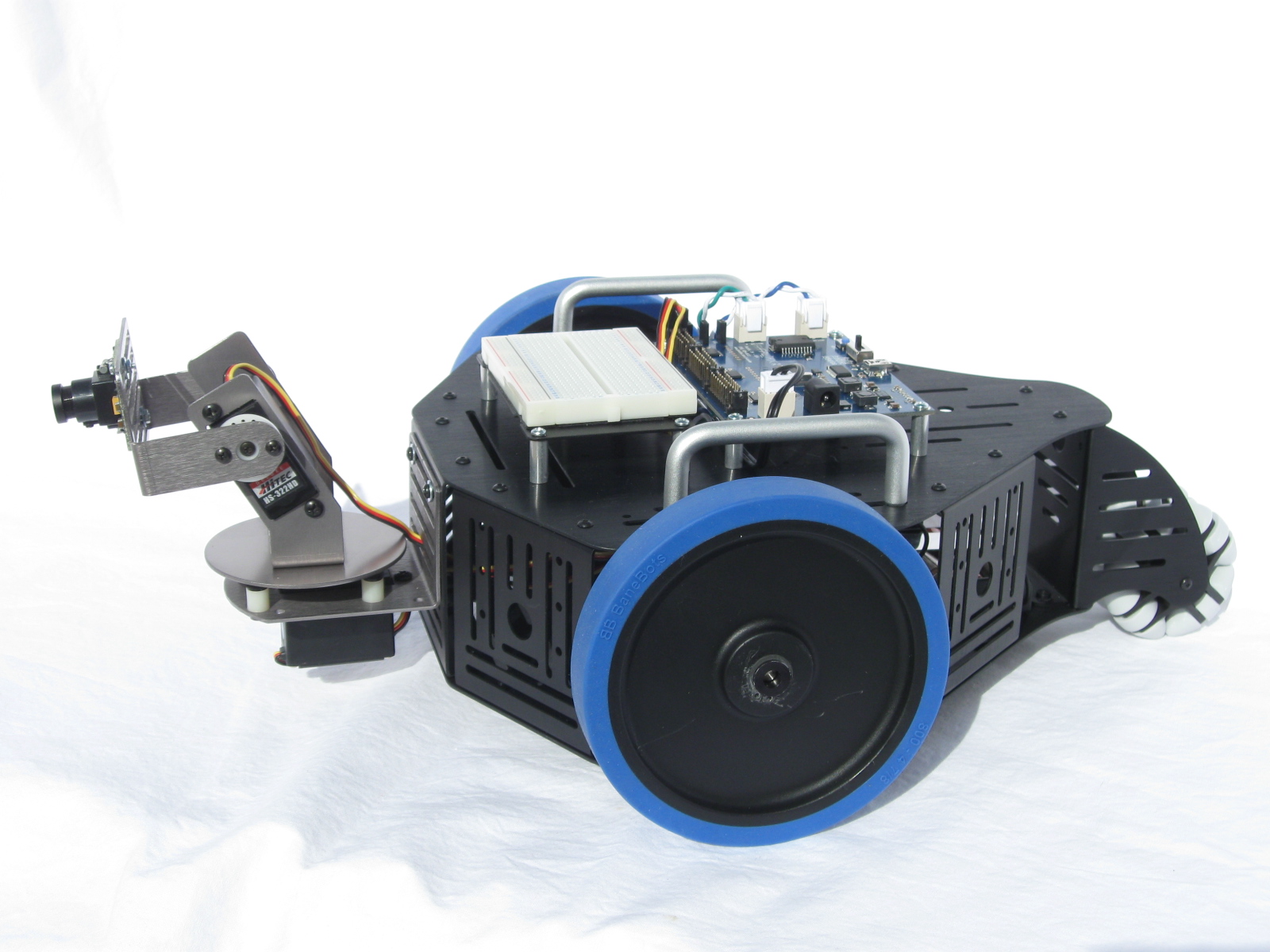
1600 x 1200 - 450K
Comments
Will this gripper be on an arm, or just attached to the front?
Do you have any ETAs on anything for the stingray?
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Check out the Propeller Wiki·and contribute if you can.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
Jax
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If a robot has a screw then it must be romoved and hacked into..
Height - 75mm
Width - 72mm
Center-to-Center for vertical slots - 10mm
Center-to-Center for·horizontal slots - 7mm
Center-to-Center for vertical holes -11mm
Center hole for grommet/wiring - 13mm
Duffer
Post Edited (Duffer) : 1/13/2010 12:05:49 AM GMT
Jax
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If a robot has a screw then it must be romoved and hacked into..
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Engineering
Check out the new Savage Circuits TV!
·