

Request Help MSR1 Propeller Board + 2 Sabertooth Motor Controllers + 1
 Manorris111
Posts: 2
Manorris111
Posts: 2
My son and I have built a fully customized robot using
(1) MSR1 Robot Contol Board
(2) Sabertooth Motor Controllers
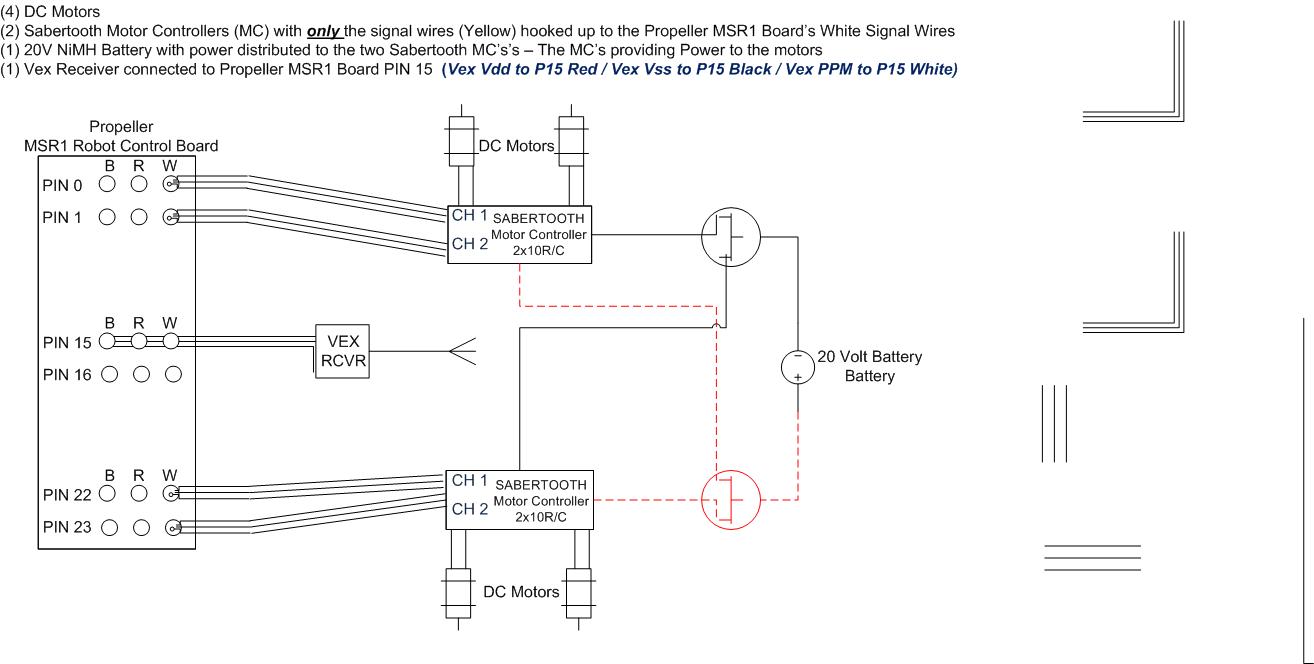
(4) DC Motors
(1) Vex Receiver & Transmitter (6 Channel)
We have attached:
- Schematic of interface for our Vex Receiver and Motor Controllers to the Propeller MSR1 Robot Control Board
- (3) Spin Objects
-- VexDemux Call··· (Top Oject)
-- Vex Demux········ (Demux the PPM to PWM ~ I think)
-- VexMotorEngine··(Intended to communicate PWM to Sabertooth MC's)
We are fairly new at this and have dove in head first - can anyone help us with the SPIN Objects.
They are all taken from past Propeller forum and·object exchange efforts.· We have done the initial modifications to the first two files and are more·stumped on the third,,, as well as the others.
Any help is greatly appreciated.
Thanks in advance.
(1) MSR1 Robot Contol Board
(2) Sabertooth Motor Controllers
(4) DC Motors
(1) Vex Receiver & Transmitter (6 Channel)
We have attached:
- Schematic of interface for our Vex Receiver and Motor Controllers to the Propeller MSR1 Robot Control Board
- (3) Spin Objects
-- VexDemux Call··· (Top Oject)
-- Vex Demux········ (Demux the PPM to PWM ~ I think)
-- VexMotorEngine··(Intended to communicate PWM to Sabertooth MC's)
We are fairly new at this and have dove in head first - can anyone help us with the SPIN Objects.
They are all taken from past Propeller forum and·object exchange efforts.· We have done the initial modifications to the first two files and are more·stumped on the third,,, as well as the others.
Any help is greatly appreciated.
Thanks in advance.
1314 x 664 - 81K
spin
27K
Comments
You will need to use a different object for you motors though. This object (obex.parallax.com/objects/51/) will do what you need. You will also need to connect the ground wire for both channels of the motor controller to the propeller board (I didn't do it on a board I was using and it took us several hours to figure out why the motors weren't running properly).
You will need some code in VexDemux Call.spin something like this to get it all to work properly.
CON motor1pin=1 'you'll have to change these to what you are using motor2pin=2 motor3pin=3 motor4pin=4 VAR long channel[noparse][[/noparse]6] ' Renamed because this holds the actual values, not a pointer to channel variables (6 longs) long syncOutPtr ' sync output that is true while receiving new pulse 'Pub Motors Variables Word Chan2 'Used to store forward or back PWM values for Pins 1 & 22 Word Chan1 'Used to store left or right PWM values for Pins 0 & 23 OBJ VEX : "VEXDemux" ' Create VEX Demux Object MOTORS : "servo32v7" ' Create Vex Motors Object that is used to control the motors PUB Start VEX.Start (15, @channel, @syncOutPtr) ' Initialize VEX Decoder Object ' VexRcvPin - VEX Receiver PPM Output ' channelValues - current channel ' values in microseconds Motors.Start ' start the motor driver repeat 'go into an endless loop Motors.set(motor1Pin,channel[noparse][[/noparse] 0]) 'update the value for the first motor Motors.set(motor2Pin,channel[noparse][[/noparse] 1]) Motors.set(motor3Pin,channel[noparse][[/noparse] 2]) Motors.set(motor4Pin,channel[noparse][[/noparse] 3])Thank you so much for the reply - very much appreciated.
We will give this a try and let you know how it goes.