

Homebuilt Robotic Platform AKA Retrobot

You can see Ken Gracey's absolutely beautiful CNC'ed wooden robotic platform at http://forums.parallax.com/showthread.php?p=869245·.·I'm here to show the other end of the homebrew spectrum,·the "poor cousin" robot I cobbled together with just a Harbor Freight bandsaw and drill press! The only thing·our robots·have in common is wood, but I'm excited at the possibilities of my inexpensive platform.
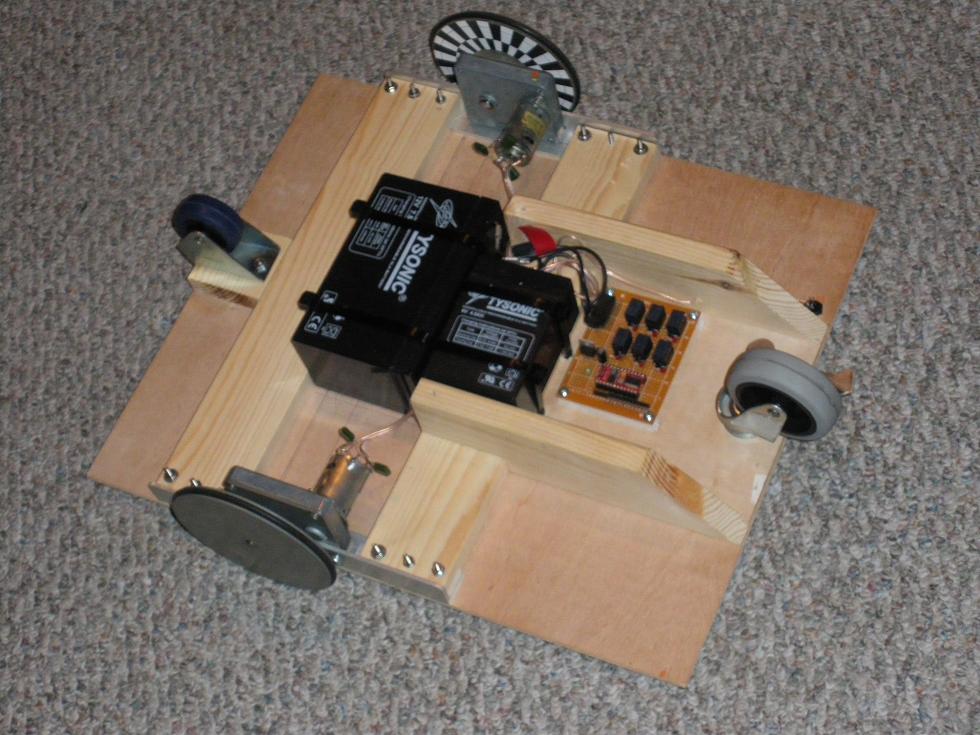
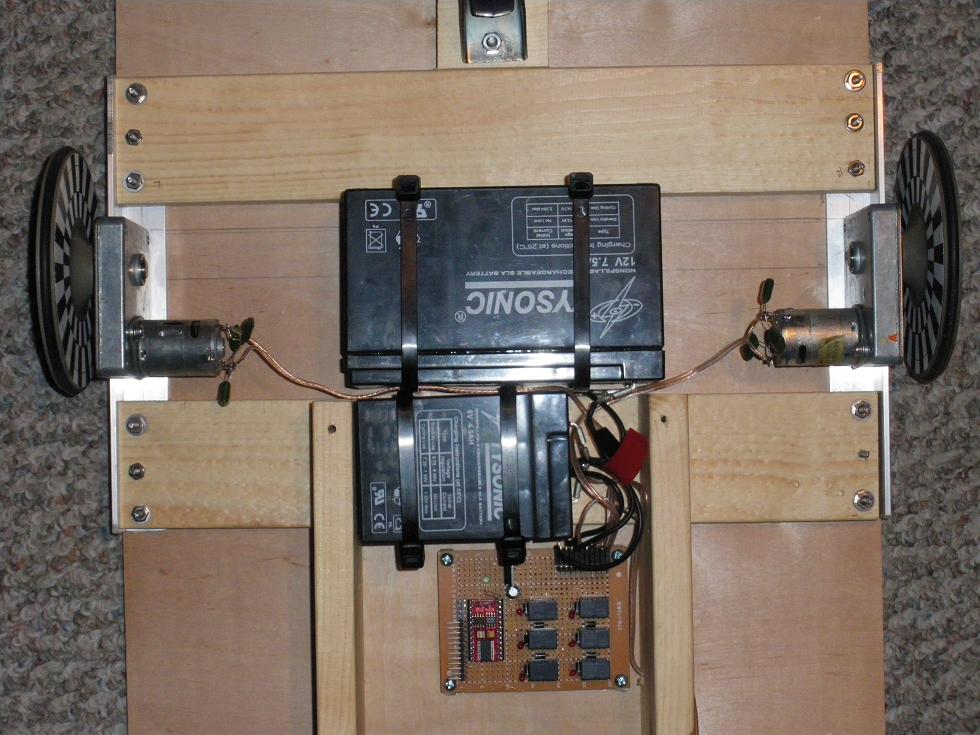
Mine is·simply an overgrown Boe-Bot right now, but·just·having a larger, heavier·platform with large wheels means it can really move repeatably through a house and is significantly less affected by carpeting, bumps,·and other real-world·factors. I am working·towards getting this robot to navigate from room to room with encoders and some IR beacons. The photos tell the tale and show the simplicity of my design. My lightweight wooden platform is·15" W·x 18" L. It is 1/4" plywood cross-braced with 1x3's for rigidity, and my· gearmotors are firmly held in place by an aluminum 'L' extrusion from Home Depot.
No surprises in the battery department: two big dumb SLA gel cells! One large 12V powers everything, and a smaller 6V gets switched in for speed control. A funky combination, but it yields great results. Most of the robot's total weight is in those batteries. I could use lighter batteries, but these are cheap and provide·the traction I need.
I posted previously about these $10 gear motors at http://forums.parallax.com/showthread.php?p=853015·. They are rated at 24V, but I am only running them at 18V for full speed or 12V low speed.·My goal was·not to·make a fast robot, but ultimately an accurate one. I·want·this robot to carry some cargo safely and reliably from room to room.
My "motor controller" is·a 5-state H-bridge made of six TF2-5V DIP DPDT relays. The relay coils each draw only 17 mA so I drive them directly from·six BS2E pins, no transistor switch required. I parallel the·relay contacts to get 2A switching capacity; motor stall current is less than one amp on these high-voltage motors. Three relays per motor give forward/reverse, high/low, and coast/brake. Nothing too sophisticated, but it works surprisingly well. Besides offering crude "ramping" to avoid·wheelslip on acceleration, high/low and coast/brake will be used effectively in the future for wheel odometry, dead reckoning, wall following, and IR·beacon tracking.
Wheel encoder electronics are coming next, you can see the encoder disks on the wheels already. Additionally, I have a variety of IR sensors to calibrate and mount for remote control, distance measuring, collision avoidance, and wall-following.
The·simple rectangular shape of my chassis may get a bit more streamlined, but it will· not end up completely circular. Circular is great for getting out of an accidental jam, but my plan is to know where I am at all times and use the corners of the robot to verify position. I'll·radius the front of the robot, and maybe taper the sides a bit, but the back will stay·nice and square for 2-corner wall contact.
The platform drives very straight and displays good·repeatably even without any encoders or sensors. I have programmed in a variety of oval, square·and figure-8 driving patterns to test the unit and it is encouraging to see how well it works. More as it develops. I'll make predictably slower progress after returning to work next week, but the show·will go on!
3/5/10 Title Edit (AKA Retrobot) for ROBOT magazine article reference·(May/June 2010)
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Post Edited (erco) : 3/5/2010 7:29:13 PM GMT
Mine is·simply an overgrown Boe-Bot right now, but·just·having a larger, heavier·platform with large wheels means it can really move repeatably through a house and is significantly less affected by carpeting, bumps,·and other real-world·factors. I am working·towards getting this robot to navigate from room to room with encoders and some IR beacons. The photos tell the tale and show the simplicity of my design. My lightweight wooden platform is·15" W·x 18" L. It is 1/4" plywood cross-braced with 1x3's for rigidity, and my· gearmotors are firmly held in place by an aluminum 'L' extrusion from Home Depot.
No surprises in the battery department: two big dumb SLA gel cells! One large 12V powers everything, and a smaller 6V gets switched in for speed control. A funky combination, but it yields great results. Most of the robot's total weight is in those batteries. I could use lighter batteries, but these are cheap and provide·the traction I need.
I posted previously about these $10 gear motors at http://forums.parallax.com/showthread.php?p=853015·. They are rated at 24V, but I am only running them at 18V for full speed or 12V low speed.·My goal was·not to·make a fast robot, but ultimately an accurate one. I·want·this robot to carry some cargo safely and reliably from room to room.
My "motor controller" is·a 5-state H-bridge made of six TF2-5V DIP DPDT relays. The relay coils each draw only 17 mA so I drive them directly from·six BS2E pins, no transistor switch required. I parallel the·relay contacts to get 2A switching capacity; motor stall current is less than one amp on these high-voltage motors. Three relays per motor give forward/reverse, high/low, and coast/brake. Nothing too sophisticated, but it works surprisingly well. Besides offering crude "ramping" to avoid·wheelslip on acceleration, high/low and coast/brake will be used effectively in the future for wheel odometry, dead reckoning, wall following, and IR·beacon tracking.
Wheel encoder electronics are coming next, you can see the encoder disks on the wheels already. Additionally, I have a variety of IR sensors to calibrate and mount for remote control, distance measuring, collision avoidance, and wall-following.
The·simple rectangular shape of my chassis may get a bit more streamlined, but it will· not end up completely circular. Circular is great for getting out of an accidental jam, but my plan is to know where I am at all times and use the corners of the robot to verify position. I'll·radius the front of the robot, and maybe taper the sides a bit, but the back will stay·nice and square for 2-corner wall contact.
The platform drives very straight and displays good·repeatably even without any encoders or sensors. I have programmed in a variety of oval, square·and figure-8 driving patterns to test the unit and it is encouraging to see how well it works. More as it develops. I'll make predictably slower progress after returning to work next week, but the show·will go on!
3/5/10 Title Edit (AKA Retrobot) for ROBOT magazine article reference·(May/June 2010)
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Post Edited (erco) : 3/5/2010 7:29:13 PM GMT


Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"A complex design is the sign of an inferior designer."
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
Looking forward to video of your "Radio Flyer" tooling over the carpet!
Steve K.
The BS2E is so easy and satisfying, no doubt, but do you know what's possible if you plop a Prop on that robot base of yours? How about speech synthesis and concurrent motor control, RF, and sensor management? It's really friendly over there in the Prop forum, erco, and we'd welcome you more frequently [noparse]:)[/noparse]
Ken Gracey
Wow,·great positive feedback. I posted a·short Youtube video at http://www.youtube.com/watch?v=cfMFO-ee6ak to show some basic maneuvers and good open-loop repeatability. If you watch closely on the turns, you can see & hear the inside wheel ramp (full, slow, coast, slow reverse, fast reverse, slow reverse, coast, slow, fast) to effect a smooth turn transition. Not bad for bang-bang relays...· it's not revolutionary by any means, but it's a robust platform that has plenty of power. IMHO, it pays to start a project·with a solid foundation·that won't introduce its own frustrations down the line. Plenty of potential here.
@Ken:·Thanks for the·thumbs-up! It means a lot and kicks my 2010 off to a great start! You're right, I'm overdue in the Propeller forum. One of your tech reps visited the company where I work last year and kindly left me a BoE-bot with a SpinStamp and then sent me a Propeller Starter kit. So I have the hardware, it's just a matter of finding the time! 26 years of toy design and cost reduction have made me a minimalist and I like to stretch·a Stamp as far as I can, even though I KNOW the Prop is better all around. I'll get to it, a few diapers from now. On another front, I have developed·an amazing consumer·robot that I'm shopping around now. I can't say much about it here, but it's simple,·does amazing things and all my prototypes are BS2-based. If I ever get up near Parallax (I'm near LA) and we can schedule a meeting, I can·show it to you.·I guarantee it will put a grin on your face. Colin Angle of iRobot saw it and·offered me a job on the spot.
Again, thanks to·everyone for your kind·comments. It's nice to see·some interest in my project.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent!
Send $1 to CannibalRobotics.com.
I like that you took time to add small details to the board like indicator LED's on each one of the relays. It just makes sense to do and you can easily see which ones are active.
Posts like this are great. One of the best things is that I can show my wife that working on projects like this all the time is completely normal......
Robert
Here is my version of Ken Gracey's CNC'ed wooden robotic platform. Ken kept promising to provide plans for the platform over a year ago so I decided to design my own which is still in development.
Pictures attached.
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
Post Edited (Tom C) : 1/8/2010 1:43:18 AM GMT
And how is life in Texas? My wife met your wife before you left Torrance. The ladies were comiserating over what it is like to be married to a robotics enthusiast... they just don't get it!
Di
Just two beautiful changes in my life lately, pic attached.·I better get rich off of one of my robots pretty soon. I'll be 70 when they're 21, and I don't wanna work until I'm 80 paying for 2 college educations! Cheers,
Eric
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
As for erco's point, we might as well introduce our spouses. When viewing my robots, my wife has mastered the nod of approval, just enough enthusiasm to help me move to the next step but a serious tad shy of that real interest that you find from fellow forum geeks. erco, those little girls are wonderful. Two is better than one. I don't think a robo-mate could have produced such pretty girls.
Ken Gracey
Parallax Inc.
TCIII's bot really is nice (I believe you posted some early pics). I like the extra deck too.
Great pictures of the twins erco!
Ken, if you want some serious teasing - "Were all just jealous of the full time tech support and back up supplies that you have!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
Post Edited (Whit) : 1/20/2010 9:58:10 PM GMT
We've seen TCIII's bot before and I think it was about a year ago. I wonder if it's rolling yet?
- Ken
I still have some work to do to get my robot really moving. I have added a turret and claw arm to the upper plate, but it will have to wait for spring and warmer weather here in Texas for continued development.
erco,
It has been cold here in North Texas unlike balmy Southern California. The temperature is presently way below freezing and there was ice on the roads yesterday morning. Fortunately my employer lets us telecommute when the weather is bad and I was able to put in a 9 hour workday from home.
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
The Wheel kit and two HB-25 are controlled by a Propeller via a wireless PS2 controller.
I hooked up a few relays through a uln2803 to control the car horn.
There is also a 4x20 char LCD and Cylon lights on the bottom plate in the front.
Lots of things to do, I'm just getting started...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
Those bots are AWESOME. Great photos, thank you for posting! If you have any videos, please share those too! I really enjoy seeing how & what others are doing. And per Robert, it's all good ammo to prove to the family that others are hard at work doing equally important robot development!
Anybody else with BYO Bots, feel free to jump into this thread! Just what have you been building in your basement?
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Per erco's request, I am posting some pics of the very first robot I built.
I started this Robot around the first of 2007. I wanted to try to build a robot from scratch (not a kit - partly because I was trying not to spend too much). I knew it's brain would be a Parallax Basic Stamp 2. For a motor, I used an old Black and Decker 3/8" drill. I kept the motor housing and ground it down. This let me keep what gearing it had to slow it down a little. I also kept the battery holder. It uses two VersaPak NiMH Batteries (3.6 Volt, 2.0 Amp Hours each - that is 7.2 Volts total). The body is plywood. It uses Dubro foam airplane wheels and a Futaba S3003 servo for steering. It is basically a copy of Roger Arrick's Arobot featured in the book, Robot Building for Dummies. I ran it around outside. It was fast so I first tried to slow it down by using one battery and then a 1.5 Volt "D" cell - just to see. Then I started researching how to do these things electronically.
I got bogged down in the electronics, especially the microcontroller. I knew I needed an H-bridge and then to understand PWM. So, I backed off and got some goodies from Parallax - starting with "What's a Microcontroller?"·
The pictures show the basic platform (top and bottom) and one of the platform with a BOE (Board of Education - Serial) and expansion board.
It is now not what I would do, but it represents where I began and it helped me identify for myself what I needed to learn to continue. It will always be special because of that. Plus, it worked (well, sort of, I got scavenged and purchased parts to scoot around). Mostly, I learned a lot - some ideas that worked and a bunch of things that didn't. Maybe it's always like that.
I still like the yellow and blue! Oh, in case you are wondering - yes, I still have it in my display case.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
Post Edited (Whit) : 1/10/2010 1:47:30 AM GMT
Congrats on being Project of the Week!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
As the Cowardly Lion quipped, "Shucks, Folks, I'm speechless." In my new high-visibility role as PotW, I should dedicate myself to finishing my own personal Project of the Week, namely my second wheel encoder. One is finished and works great. I'm using the same Hamamatsu reflectance sensor I used on·my Scribbler at http://forums.parallax.com/showthread.php?p=772850· If time and family permits, I'll finish the encoders and try to get another YouTube video up this week. Pressure's on!
Meanwhile, I encourage everyone to continue posting your own homemade robots here or start your own thread. It's helpful and encouraging·to see what's going on out there. Besides, you may end up as Project of the Week!
Cheers,
erco
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
My first... Tamiya high power gearboxes, 6 "D" cells (motors) + 4 "AA" (electronics), Prop, Ping obstacle avoidance, no encoders, Tricycle wheel arrangement with front wheel steering (made with recycled lego parts, kept falling off).
Ah yes the arm... I was thinking about spirit and opportunity wanted to do all kinds of "Stuff" with it. The reality was that if I put a wrist motor on it I couldn't lift it and the motor gearbox combo chosen was way under powered but it did move around and I did have good control over the arm. Eventually abandoned it but it really was a fantastic first learning experience. Basically it just wandered around not (mostly) crashing into things, stopping every once in awhile to move the arm about.
Then 5 generations later there is this next one built on a boebot chasis the picture tells all.
So the big lesson I learned is that the software for a little robot is for the most part identical to that used on the big guys
and since the hardware is where the money is, little is where the savings are.
For me at least software is much more fun than hardware
and now on to my newest - the stingray.
Ray
Post Edited (Ray0665) : 1/12/2010 11:41:20 PM GMT
1) No switching losses. There is no voltage drop (my smaller 6V robots slow noticeably when they lose a volt through a transistor H-bridge).
2) Commands to switch relays execute quickly. A single HIGH or·LOW·command (which can be on/off or fast/slow) executes much faster than a·SEROUT or·PULSOUT command to set a speed control.
3) I have LOTS of relays. I stockpiled these high-efficiency polarized Aromat/NAIS relays that a Stamp can drive directly. Current draw is exceptionally low at 17 mA per coil. DIP package plugs into an IC socket.
4) On at least one occasion a relay acted like a fuse and blew when a short-circuit occurred. Easily replaced.
5) These particular 24-volt motors use such little current (typ 300 mA in use; STALL current is 750 mA at the 18V I'm using) that the relay contacts don't get much abuse.
I like stretching a Stamp to do everything possible, even though a BS2 isn't an extremely fast processor. It requires a tight, fast software loop to accurately monitor two wheel encoders for differential drive and adjust two motor speeds accordingly. Switching a motor speed relay (fast/slow) via a high/low command is much faster than serout/pulsout (typically used for speed controllers) and speeds up the loop, which improves accuracy and repeatability. It may never be true PID, but faster response time means less accumulated odometry error.
Building and tweaking relay H-bridges·is just plain satisfying to me. I enjoy soldering the boards as much as programming the Stamps. I came up with the circuit shown at http://forums.parallax.com/showthread.php?p=749676 ·which allows motor coasting·and dynamic braking. The dynamics of robot motion change drastically as the speed & weight of a robot increase, and coasting versus braking becomes more important. The platform here achieves coasting, braking and 2-speed operation using 3 relays per motor.
Lastly, per Robert Doerr's post, the LEDs indicating relay operation make for an interesting light show. Long before the PC board is installed on the robot, I enjoy bench-testing the board with a simple program to sequentially toggle all the relays continuously. The glorious clicking &·ticking sounds and flashing LEDs on the board all remind me of that wise-cracking·B-9 robot from Lost in Space. That's the ultimate robot·and a very good memory for me!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Post Edited (erco) : 1/13/2010 3:20:26 AM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Arguing with myself--sometimes me, myself, and I don't always agree.
(Former) Caterpillar product support technician
I did get both of my wheel encoders·finished and·working tonight, after a minor mechanical retrofit to the gearmotors, pic in the thread at· http://forums.parallax.com/showthread.php?p=853015
The platform drives·very straight now, even with my very first quickie code. I'm working·on a video to show that, hopefully up Thursday or Friday.
My encoders·and relay H-bridges certainly aren't high tech. Some·might even·say "ghetto", but I'm·actually surprised and quite pleased with the accurate results I getting, especially after following the Stingray encoder thread at http://forums.parallax.com/showthread.php?p=869983·. For now,·I'm using 36 ppr (higher resolution encoder disks are coming) and I get very effective dynamic braking·from my motor when I want it.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Post Edited (erco) : 1/14/2010 8:31:52 AM GMT
A decent straight-line driving demo video at http://www.youtube.com/watch?v=Trv682XZ_8c· A bit shakey since I'm shooting the video while crawling behind the robot as it drives down my hallway.
I clearly need a bigger house with lots of open space to properly demonstrate this large robot.·With a photo/video studio. And a robot lab. And a machine shop. And a 24-hour deli.
That's ALL I need. I don't need one other thing.
Maybe a remote control.
And·a Thermos.
That's all.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
Post Edited (erco) : 1/15/2010 5:12:04 AM GMT
..in fact the only thing not jerky is that bot of yours...nope..straight as an arrow!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"A complex design is the sign of an inferior designer."
Post Edited (iDave) : 1/15/2010 4:22:38 AM GMT
Great work. I love the underbelly tour and it does drive very,·VERY,·straight.
The poor cousin should be as popular as the Opti-grab.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
Post Edited (Whit) : 1/15/2010 6:28:38 PM GMT