

Help Please - Class Project, Boe-Botic Arm Details Inside

Hi All,
I am in school for Engineering. My group has chosen to do a Boe-Bot for our final project and I wanted some feedback on whether it's possible to do what we are thinking and how I might go about it.
We are looking to make a bot with a robotic arm that can sense an object, determine what color it is, pick it up and drop it into a cup/bowl/bucket that corresponds to that color. A sorting robot if you will.
Just looking for guidance right now, if you are a pro and want to tell me if this will work or not (don't know if there is a capability limit to the bot) that would be great. Also if you have any pointers on where I might find the uncommon parts (robotic arm) would also be appreciated.
I am going to link a sample of something -like- what I want to do, caution: The music on this youtube is loud and noxious.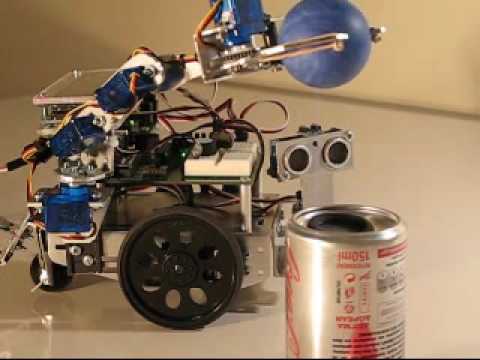
Thank you all in advance,
M.W.
I am in school for Engineering. My group has chosen to do a Boe-Bot for our final project and I wanted some feedback on whether it's possible to do what we are thinking and how I might go about it.
We are looking to make a bot with a robotic arm that can sense an object, determine what color it is, pick it up and drop it into a cup/bowl/bucket that corresponds to that color. A sorting robot if you will.
Just looking for guidance right now, if you are a pro and want to tell me if this will work or not (don't know if there is a capability limit to the bot) that would be great. Also if you have any pointers on where I might find the uncommon parts (robotic arm) would also be appreciated.
I am going to link a sample of something -like- what I want to do, caution: The music on this youtube is loud and noxious.
Thank you all in advance,
M.W.
Comments
Sensing an object and gripping it is the hard part. A lot depends on what kind of object you're talking about, how it would be presented, and how it would be gripped. I can imagine something like a light weight block with rough sides and a gripper with fairly large lightly padded paddles that move in and out in parallel so they can be positioned widely around the object, then slowly closed on it to grip it. The result wouldn't need much precision and could be done with a combination of a ultrasonic and IR sensors.
The sort of gripper shown in your YouTube video could also work for some objects like the light balls shown. I think the PING there is just used to detect the presence of a ball on the can. It wouldn't provide any location information, so the positioning of the arm is fixed by the program used.
Thank you for your reply. My initial idea was to use ping pong balls like in the video, but with your recommendation we may change that to wooden children's blocks. I am considering using a fixed track (such as a line sensing program) to guide the bot around. I will look into the M & M sorter you mentioned to see how their color detection worked.
I appreciate all the info I can gather on this before I get started, so thank you again.
M.W.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Tia'Shar Manetheren
Alright, the moving and stuff may be overly ambitious of me. Same deal, no moving.
See Object
Identify Color
Pick up object
Rotate arm 45, 90 or 180 degrees (based on color)
Drop object
Bot stays stationary, objects are fed to it, like the youtube video. I got some 1" cube foam blocks in bright colors so we may use those.
So, maybe a BS2 module? I think this will be easier than having it move and whatnot. I am still dreaming big but I want to start small and have it work rather than go big and go down in flames.
Thank you again for bouncing ideas with me,
M.W.
Use the various resources available from Parallax. There are lot of tutorials and many individual exercises in each tutorial. Do a lot of them. They teach you basic concepts in hardware and software. Things will go a lot easier if you invest the time and energy in going through the exercises.
Important tutorials and references:
BASIC Stamp Syntax and Reference Manual
What's a Microcontroller?
Robotics with the BoeBot.
Most Parallax products (like their color sensors) come with fairly detailed documentation and sample programs with links on the webstore product page for that product. Get used to looking at that list for anything you get or are thinking of getting from Parallax.