

Ping Range differs
 Matthias09
Posts: 47
Matthias09
Posts: 47
Hey guys,
just browsed the forum but didn't find anything, so I question you:
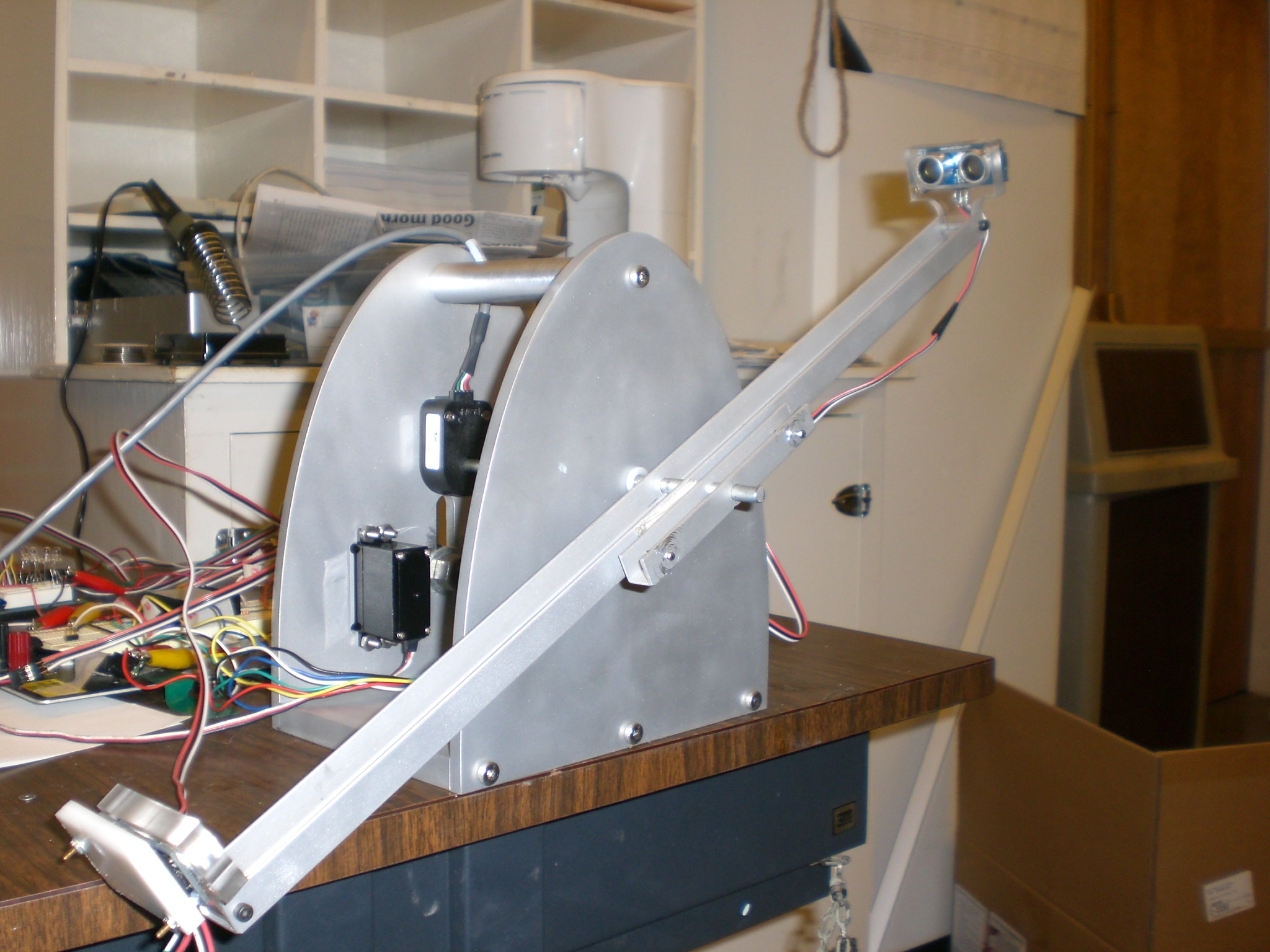
As some of you might know, I'm building a ball and beam system and detect the ball on the beam with one PING sensor. Now after going through several weeks of experience I managed to adjust the PING and it now tells me very neat, where the ball is -- as long as the beam is on mounted on the table (what I did for testing). When i start to mount it to the system though (ca 10in off the ground), the range if the PING decreases drastically, from before around 2 ft down to 10 in. However, sometimes the PING still covers the whole range. So what is happening? Obviously the PING picks up ground reflections that go away, when taking off the ground. Or something else?
Any idea what I can do?
Thank you!
Matthias
PS: to get a better idea what off the ground means, I attached a pic of the system. You see also a second ultrasonic attached that I don't use.
just browsed the forum but didn't find anything, so I question you:
As some of you might know, I'm building a ball and beam system and detect the ball on the beam with one PING sensor. Now after going through several weeks of experience I managed to adjust the PING and it now tells me very neat, where the ball is -- as long as the beam is on mounted on the table (what I did for testing). When i start to mount it to the system though (ca 10in off the ground), the range if the PING decreases drastically, from before around 2 ft down to 10 in. However, sometimes the PING still covers the whole range. So what is happening? Obviously the PING picks up ground reflections that go away, when taking off the ground. Or something else?
Any idea what I can do?
Thank you!
Matthias
PS: to get a better idea what off the ground means, I attached a pic of the system. You see also a second ultrasonic attached that I don't use.
2048 x 1536 - 2M
Comments
I'm guessing, since I've never played with the ping sensor, but I would think the table, item you were sitting on was narrowing the beam to help see the ball. Now that you don't have the narrowing effect, the sensor is having a hard time seeing the small object.
I have heard of focusing the beam with PVC pipe, and such to help narrow the beam pattern, but some of the more experienced people here could probably help better with a solution.
James L
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
James L
Partner/Designer
Lil Brother SMT Assembly Services
Are you addicted to technology or Micro-controllers..... then checkout the forums at Savage Circuits. Learn to build your own Gizmos!
John Abshier
to clarify some things better than I did in first place:
- James: could you specify what narrowing with PVC pipe means?
- John: Does the ping detect the bar the beam is mounted on? It does, just tried out [noparse]:([/noparse]
- LilDi: The ping range is it's full 6ft (I tested). However, with detecting round objects, like the ball on the beam, it decreases to around 2ft (when on the table). This is ok, as my beam is a little bit shorter, hence the Ping covers it fully. Only when I take the beam off the ground, the range decreases to insufficient 10 in. I power the ping with the Vdd of the SX developer board. No I didn't do anything regarding voltage adjustment.
I did some further testing and came to the following results:
- taking it from the ground has alone no impact in the range of the sensor
- however, applying it to the system is the game changer. The beam is too narrow fixed to the housing (Alumina), the sensor somehow detects the big plate (see picture) too.
So it solely the housing and the mounted bar that impacts the Ping. What can I do here? I thought about wrapping the bar and the housing with some kind of absorbing material (with rough surface), so the Ping doesn't get a signal back.
I also thought about focusing the Ping signal by building a channel around it (doing that right now). All spread out signals (that detect housing and bar) will be 'immediately' reflected back and with Delay between PULSEOUT and PULSEIN not detected. What do you think about that? Right now the channel, made of paper wrapped around the Ping is 1.5 in long.
I hope that helps you helping me [noparse]:)[/noparse]
Thank you!
Matthias
Post Edited (Matthias09) : 10/28/2009 1:33:35 AM GMT
-Phil
Post Edited (Phil Pilgrim (PhiPi)) : 10/28/2009 1:44:36 AM GMT
You may need to rotate the PING up and out/away from the machinry in the middle of your device. To visualize this: From the perspective of the PING unit on the right, the object you're detecting should be in the lower-right quadrent of the cone produced by the PING transducer.
Duffer
- Phil: Thanks, I won't bother then [noparse]:)[/noparse]
- Timmoore: I'll try that. However, what I figured out (and described in my 2nd post) is that when I hold the beam in the air with my hand and nothing around, it still works. So the problem is not the 'lost' ground, but 'added' obstacles like the big motorhousing and the mounting bar of the beam. I'll have to figure out a way to make the PING not detect them.
- Duffer: I'll try that. However, the sensor get's much less accurate, the values are bouncing a lot, when the obstacle is not in the main area.
- all: what do you think about the two approaches
1) Mask everything I don't want to detect with an absorbent material (if existent). Who has done that before?
2) Building a channel around the sensor that 'focuses' the signal. I actually just tried that but have problems, that I now can only detect the ball approx. 1in in front of the sensor. Everything else is not detected. I played around with the delay between PULSEOUT and PULSEIN but without success. Any idea if this approach can be successful?
Thank you very much!
Matthias
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
- Stephen