

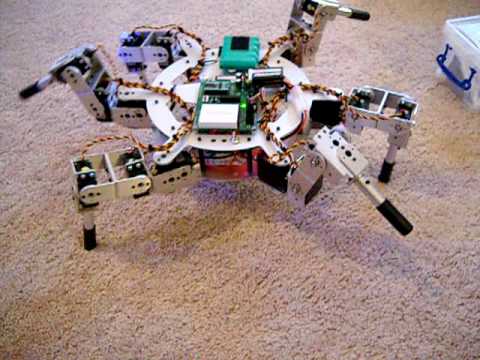
AH3-R Hexapod with a BS2 microcontroller and Propeller servo controls

Hello,
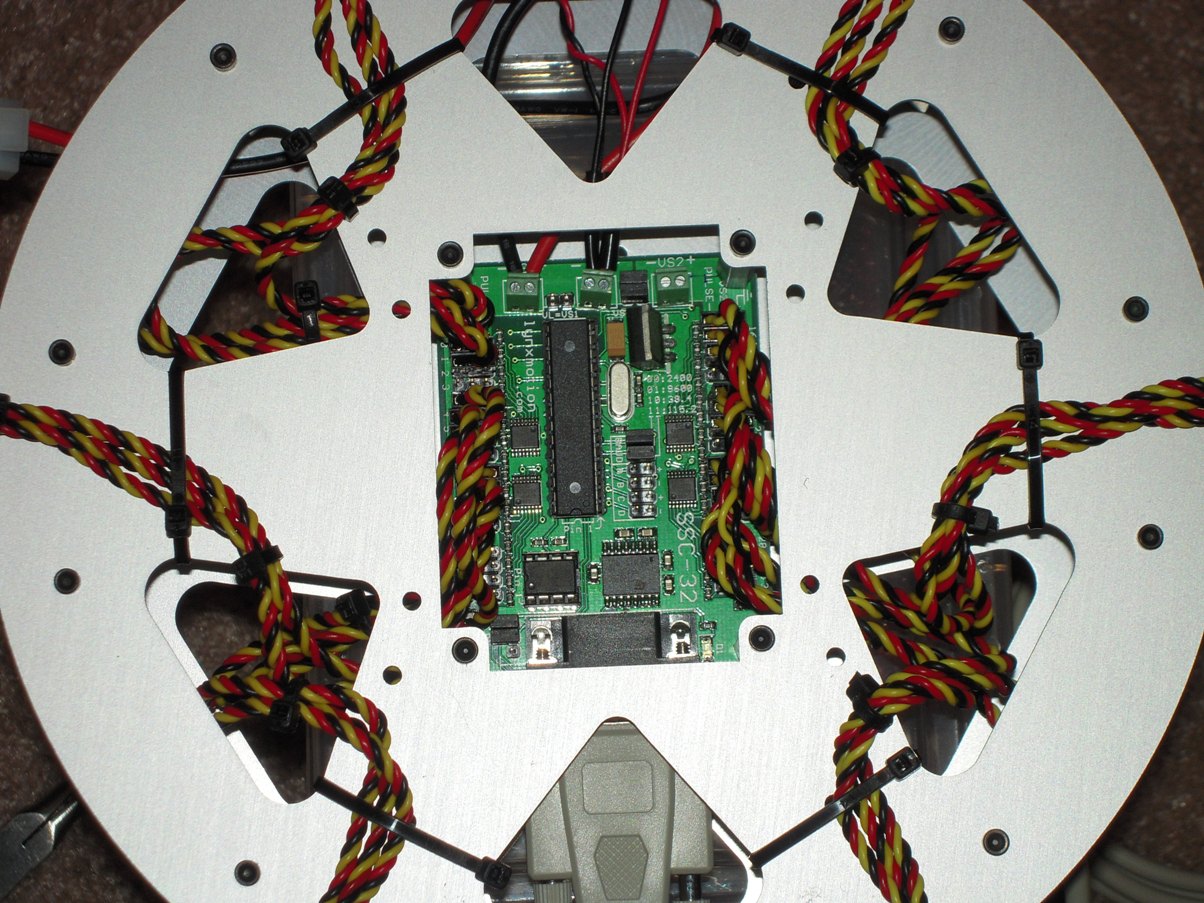
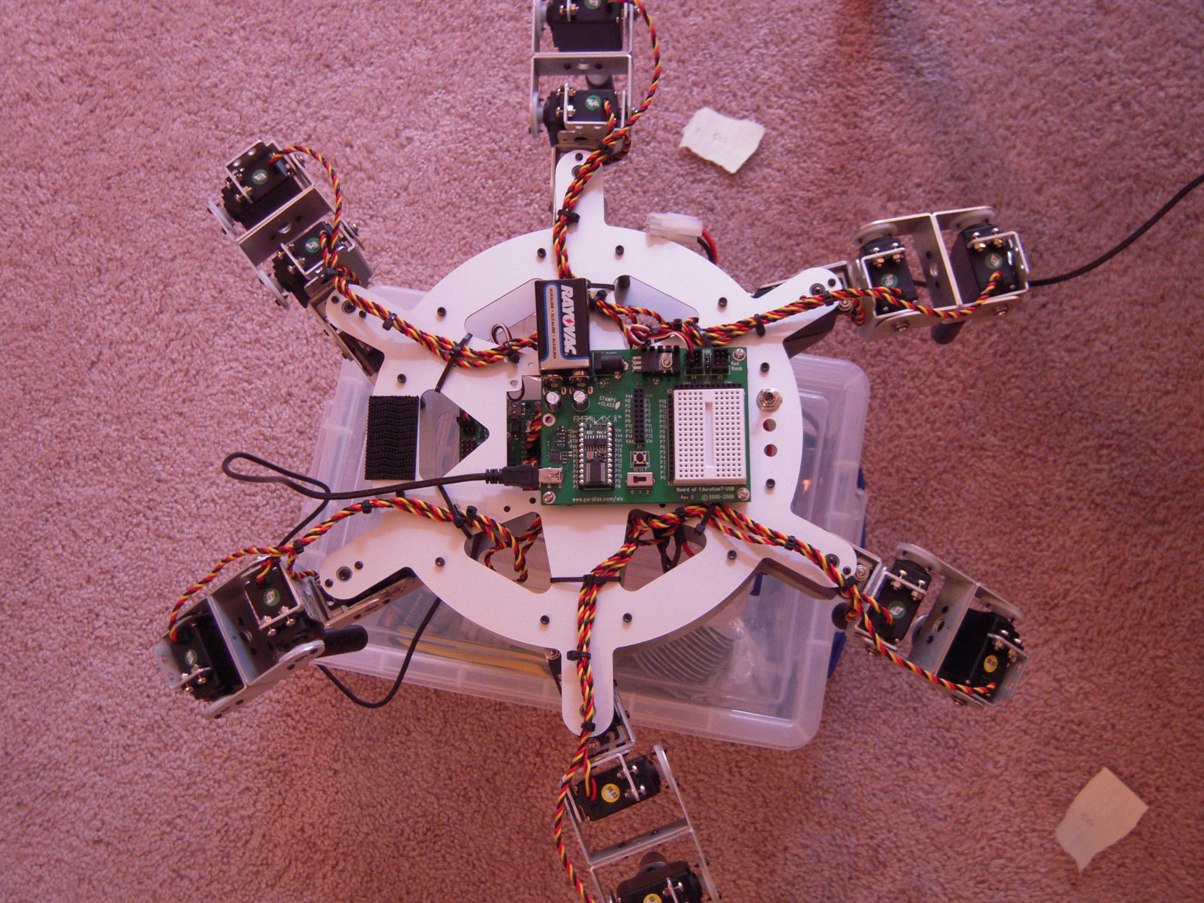
I recently built a AH-3 from Lynxmotion, but I wasn't satisfied with the control that I could have over the SSC-32 servo controller so I've replaced the electronics with a BS2 and two of the new Propeller servo controllers. (I also didn't want to have spend the time to learn how to program the Atom or SSC-32 [noparse]:)[/noparse]
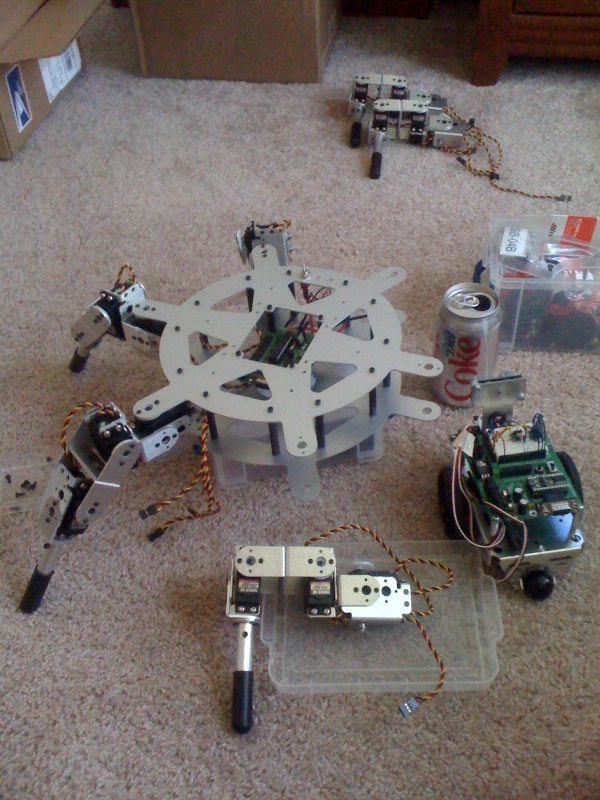
Anyhow, here are some pictures of the robot during the build, with the SSC-32 and Atom controllers and some with the BS2 and propeller servo controllers. I have some video of it walking with both sets of electronics, but I need to compress the video or I'll just post them on YouTube. I'm curious to see if anyone else here is working on articulated walkers (4 or 6 legs, 2 or 3DOF). If you like I can post my "painfully obvious, non-professional" [noparse]:)[/noparse] , otherwise I'll try and update this post as I go along.
Dave
update: 10/11/09
Here are some links to it walking with Lynxmotion's code and two with my code (posted below)


enjoy
Post Edited (vanmunch) : 10/11/2009 10:03:54 PM GMT
I recently built a AH-3 from Lynxmotion, but I wasn't satisfied with the control that I could have over the SSC-32 servo controller so I've replaced the electronics with a BS2 and two of the new Propeller servo controllers. (I also didn't want to have spend the time to learn how to program the Atom or SSC-32 [noparse]:)[/noparse]
Anyhow, here are some pictures of the robot during the build, with the SSC-32 and Atom controllers and some with the BS2 and propeller servo controllers. I have some video of it walking with both sets of electronics, but I need to compress the video or I'll just post them on YouTube. I'm curious to see if anyone else here is working on articulated walkers (4 or 6 legs, 2 or 3DOF). If you like I can post my "painfully obvious, non-professional" [noparse]:)[/noparse] , otherwise I'll try and update this post as I go along.
Dave
update: 10/11/09
Here are some links to it walking with Lynxmotion's code and two with my code (posted below)
enjoy
Post Edited (vanmunch) : 10/11/2009 10:03:54 PM GMT
600 x 800 - 171K
1204 x 903 - 271K

600 x 800 - 193K

1204 x 903 - 253K
1204 x 903 - 292K
Comments
this is what i would like to do also, i've got the HDAT and would like to convert to the prop-sc.
i never got far with the gait-pic.
I have the BS-board but why not use the prop demo board? (sd-card / video )
i would love to try and go alone with on this project . i'm a little weak in code programing and could use the help looking out!
i'll try and post some photos later also so you look at my work also.
ps nice to meet you
Thanks for the compliment. I've been thinking about switching over to the Propeller, but so far the BASIC has been able to do everything that I need. (Although the biggest reason is that I just don’t want to stop working building the walker.) I’m also a little hesitant because there doesn’t seem to be as much documentation support from Parallax on how to use the sensors in spin as they do for PBASIC. I’m guessing that they’ll start writing more example spin code for their sensors now that they’ve come out with the Stingray. (I’m especially interested in the control board. It looks like it can handle 24 servo/sensors).
Anyhow, it would be great to see some pictures of your project. Below is the code “as is.” It’s a work in progress. I call the very front two legs “paws” because I was/am hoping to make it be able to dig or add grippers.
' {$STAMP BS2}
' {$PBASIC 2.5}
'SixLegWalkVer9.4.bs2
pw VAR Word
ra VAR Byte
sdat CON 15
baud CON 396
LFhip CON 5 'Left Front hip
LFknee CON 6
LFfoot CON 7
LFhipV VAR Byte
LFkneeV VAR Byte
LFfootV VAR Byte
LRhip CON 8 'Left Rear hip
LRknee CON 9
LRfoot CON 10
LRhipV VAR Byte
LRkneeV VAR Byte
LRfootV VAR Byte
RFhip CON 0 'Fight Front hip
RFknee CON 1
RFfoot CON 2
RFhipV VAR Byte
RFkneeV VAR Byte
RFfootV VAR Byte
RRhip CON 13 'Right Rear hip
RRknee CON 14
RRfoot CON 15
RRhipV VAR Byte
RRkneeV VAR Byte
RRfootV VAR Byte
LPawHip CON 24 'Left Paw hip
LPawKnee CON 25
LPawFoot CON 26
LPawHipV VAR Byte
LPawKneeV VAR Byte
LPawFootV VAR Byte
RpawHip CON 29 'Right Paw hip
RPawKnee CON 30
RPawFoot CON 31
RpawHipV VAR Byte
RPawKneeV VAR Byte
RPawFootV VAR Byte
DO
GOSUB RPaw_Down
GOSUB LF_Down
GOSUB RR_Down
PAUSE 500
GOSUB LPaw_Up
GOSUB RF_UP
GOSUB LR_UP
GOSUB RPaw_Rotate_Backward
GOSUB LF_Rotate_Backward
GOSUB LPaw_Rotate_Forward
GOSUB RF_Rotate_Forward
GOSUB RR_Rotate_Backward
GOSUB LR_Rotate_Forward
PAUSE 200
GOSUB LPaw_Down
GOSUB RF_Down
GOSUB LR_Down
PAUSE 500
GOSUB RPaw_Up
GOSUB LF_UP
GOSUB RR_UP
'PAUSE 400
GOSUB LPaw_Rotate_Backward
GOSUB RF_Rotate_Backward
GOSUB RPaw_Rotate_Forward
GOSUB LF_Rotate_Forward
GOSUB LR_Rotate_Backward
GOSUB RR_Rotate_Forward
PAUSE 200
LOOP
'---Subroutine
RPaw_Down:
'RPaw
pw = 750
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RPawknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
RPaw_Rotate_Backward:
ra = 11
pw = 500
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RPawHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
FOR pw = 800 TO 750 STEP 20
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RPawfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
NEXT
RETURN
RPaw_Up:
'RPaw
ra = 11
pw = 1100
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RPawknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RPawfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
RPaw_Rotate_Forward:
ra = 11
pw = 650
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RPawHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
'
LF_Down:
ra = 11
pw = 650
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 700
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
LF_Rotate_Backward:
ra = 11
pw = 850
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
FOR pw = 800 TO 750 STEP 10
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
NEXT
RETURN
LF_UP:
ra = 11
pw = 1100
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 900
'ra = 9
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
LF_Rotate_Forward:
ra = 11
pw = 650
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
ra = 10
pw = 800
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LFfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
'
RR_Down:
'RR
pw = 750
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RRknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
RR_Rotate_Backward:
ra = 11
pw = 850
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
FOR pw = 750 TO 700 STEP 10
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RRfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
NEXT
RETURN
RR_Up:
'RR
ra = 11
pw = 1100
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RRknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RRfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
RR_Rotate_Forward:
ra = 11
pw = 1000
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
'
'
'
LPaw_Down:
'LPaw
pw = 750
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LPawknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
LPaw_Rotate_Backward:
ra = 11
pw = 1000
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LPawHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
FOR pw = 800 TO 750 STEP 20
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LPawfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
NEXT
RETURN
LPaw_Up:
'LPaw
ra = 11
pw = 1100
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LPawknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LPawfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
LPaw_Rotate_Forward:
ra = 11
pw = 850
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LPawHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
'
RF_Down:
ra = 11
pw = 700
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
RF_Rotate_Backward:
ra = 11
pw = 650
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
FOR pw = 800 TO 750 STEP 10
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
NEXT
RETURN
RF_UP:
ra = 11
pw = 1100
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 900
'ra = 9
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
RF_Rotate_Forward:
ra = 11
pw = 850
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
ra = 10
pw = 800
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", RFfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
'
LR_Down:
'LR
pw = 730 'offset due to servo instalation
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LRknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
LR_Rotate_Backward:
ra = 11
pw = 650
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
FOR pw = 750 TO 700 STEP 10
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LRfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
NEXT
RETURN
LR_Up:
'LR
ra = 11
pw = 1100
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LRknee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LRfoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
LR_Rotate_Forward:
ra = 11
pw = 500
SEROUT Sdat, Baud+$8000, [noparse][[/noparse]"!SC", LRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
RETURN
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
- Stephen
MY BOT is the 6 six legged HDAT crustcrawler
i changed out the controllers from the PSC to the PSCU.
FIRST i had the legs connected as Leg1(0,1,2,) Leg2(4,5,6,) Leg3(8,9,10) ran your code and got nothing no movement at all from legs.
After looking at your photos closer i change them to the way your bot is connected with Leg1(0,1,2,) Leg2(5,6,7,) Leg3(9,10,11) both jumpers installed on pscu ran your code and still nothing.changed out PSCU batts to full chaged ones and still nothing.
i have some photo but i need to change the size will try and attach later.
have you gotton your's to walk yet??
i have both PSCU working i mean i have a red power led and a green data led seem to blink as if the code run though the PSCU
The battery's used are two 7.2v/2000mAH Ni-Cd on the PSCU's
the last photo is a small bot in the works but i'm hopeing that the stingray controller well be sold on it's on wonder what the max motor allowed the motors on the stingray are on the small side.
Sweet robot(s)! Yes, I've gotten mine walking, but you might have to mess-around with the "Pw" values for the different servos since your's is a different shape. Your other robot looks really cool too.
I think that I see your problem with getting your servos working. Looking at the first picture I see that you are using a BS 2p 24 microcontroler that runs at 12,000 instructions/sec. When I wrote the above code I was still just using a BASIC stamp 2 that runs at 5,000 instructions/sec. That's why the code reads, " baud CON 396." I then switched to a BS2sx that runs at 10,000 instructions/sec or 2.5 times faster. I found that my servos didn't work until I multiplied 396 by 2.5 = 990 I think that you need to change the baud number from 396 to 950.4 (396 x 2.4) but I can't guarantee that it will work. 950 might be close enough.
One other thing that you have to do with the two propeller servo controllers is make sure to program one as the number "2" so that it knows it's suppose to respond to servos 16-31. The instructions are at http://www.parallax.com/Portals/0/Downloads/docs/prod/prop/28830-PropServoControllerUSB-v1.0.pdf Make sure that you don't accidentally program both of the servo controls as number "2." I did that and had to change one back, but the instructions they give will help you avoid that mistake.
Anyhow, download the code to your BS2p24 and let me know if that Baud thing fixes it, otherwise you might try using a BS2 with a baud rate of 396 just to make sure everything works. Have fun!
Dave
PS I re-read your post and one other thing is that you'll have to change the "Leg", "Knee" and "Foot" constants to match the way you have it connected on the propeller servo controllers
example:
LFhip CON 5 'Left Front hip --->LFhip CON "your value here from the propeller servo controllers"
LFknee CON 6 --->LFknee CON "your value here propeller servo controllers"
LFfoot CON 7 --->LFfoot CON "your value here propeller servo controllers"
ect....
I think you already did this, but just in case. [noparse]:)[/noparse]
enjoy!
updateing my last post the photo with BSp24 is the old configeration with the g-pic install photo 4 shows the Bs2 installed.
I had gotten ahead of myself a little had to go back and setup the pscu #1
first checked ver.# 1.0,·set SBR mode o, set PSS mode 0,enable ch 0-15 .now i have the first three(3) leg working somewhat still need tuning a little but i can't getn the second pscu #2 working yet i've set the SBR mode o,set PSS mode 1 (15-30). iget the green led blinking but no sevro movement. ?what i'm i missing. well· am off to check out your you tube·video.
set
Programming the BasicAtom (the MCU that the Phoenix comes with) is relatively easy. All the programs are there for you to get started.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
No purchase necessary. See back panel for more details.
Tired of the same old robot brains? not enough processing power? Get the Propeller Robot Module now!!
Yes, I've programed a couple of different gaints. I haven't had a lot of time to refine them because I want to start mixing some sensors into the pot. I posted three videos of my hexipod (above). One, using the "standard" Lynxmotion electronics and code generated by their PowerPod. That was pretty simple,... after I found a computer with a serial com port. However, I didn't really feel satisfied with the amount of control that I had over the whole process so I replaced the electronics with a BS2 and 2 of the new propeller servo controllers. So.... that's what the other two videos show. The code that was running on the BS2 in the videos is posted above. I know it's really rough and it would be great if someone could help refine it. Right now it just walks forward... fearlessly into whatever. [noparse]:)[/noparse]
Hey a-spider,
That's puzzling, I would try working backwards to fine the problem like swapping the batteries to make sure power is going to both PSCs, trying a servo connected to the second PSC and connecting it the the 1st one, checking to make sure the code matches the pins the servos are connected to, make sure your connector between the two PSC is connected correctly, lot of time just messing with it [noparse]:)[/noparse] ...... maybe post another picture of your set-up? When I first connected everything, I spent an evening trying to get the silly servos to move. I tried everything, then around 10:30 I realized that I had only been moving the three point switch on the BS board to the first position, not the second one! Opps! Oh, well that's what keeps us humble. [noparse]:)[/noparse] Keep us informed on how it goes.
Dave