

Driving a Servo
 T Chap
Posts: 4,260
T Chap
Posts: 4,260
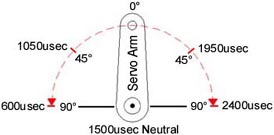
I need to start working out some ideas for driving a single servo from 600uS to 2400uS. The motor arrives tomorrow but I wanted a head start, this is a first trying to position a motor over 180 degrees. I need to be able to update it's position in degrees.
Is this just as simple as running PWMASM obj and setting period to 20ms, and adjusting the duty from 600uS to 2400uS as needed to set angle?
Is this just as simple as running PWMASM obj and setting period to 20ms, and adjusting the duty from 600uS to 2400uS as needed to set angle?
274 x 135 - 8K
Comments
Leon
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Amateur radio callsign: G1HSM
Suzuki SV1000S motorcycle
I will test this system coming in this afternoon. If it isn't accurate enough, I'll look up the high accuracy version. This is a first trying out a servo, and I had no idea these were available in some of the holding torques I have seen.
Leon, where would you find a high accuracy that would fit this gear and mounting apparatus?
I needed 270 degrees, so this will be geared 3:2, in other words the 180 output of motor travel is converted to 270 actual output, but the load is nil, the motor is a 'high torque digital'. Depending on the cost of a high accuracy, it may be just as easy to add an encoder to this one, and run the servo in closed loop.
www.mclennan.co.uk/datasheets/european/dcservo/p5gearedmotor.pdf
They can be supplied with pots.
Leon
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Amateur radio callsign: G1HSM
Suzuki SV1000S motorcycle