

The SUPERBOE))) is here!
 Scott Portocarrero
Posts: 72
Scott Portocarrero
Posts: 72
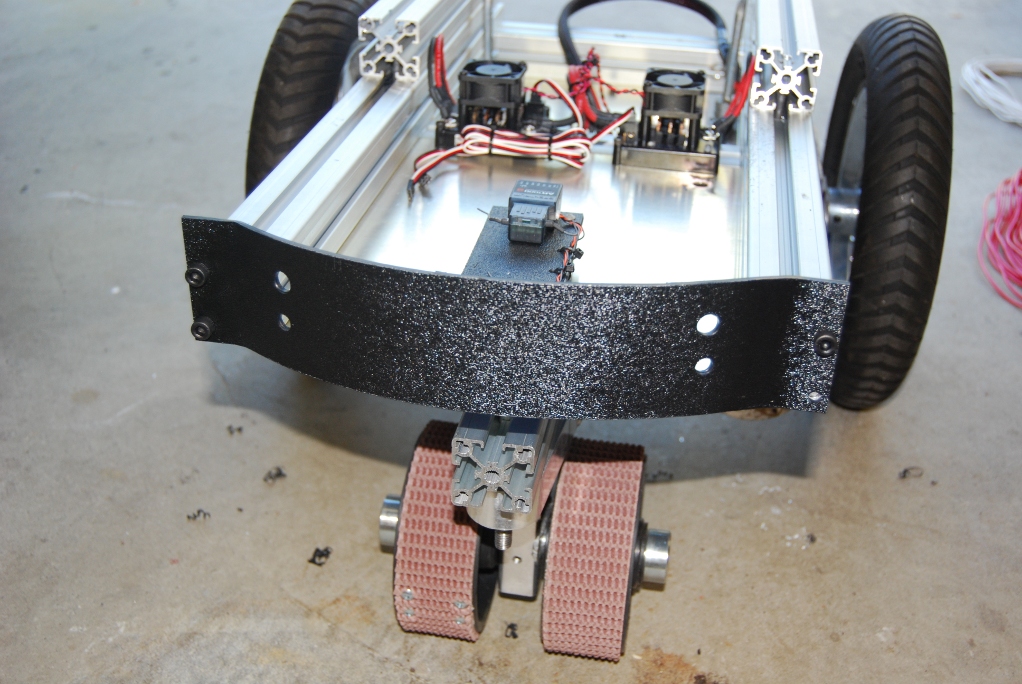
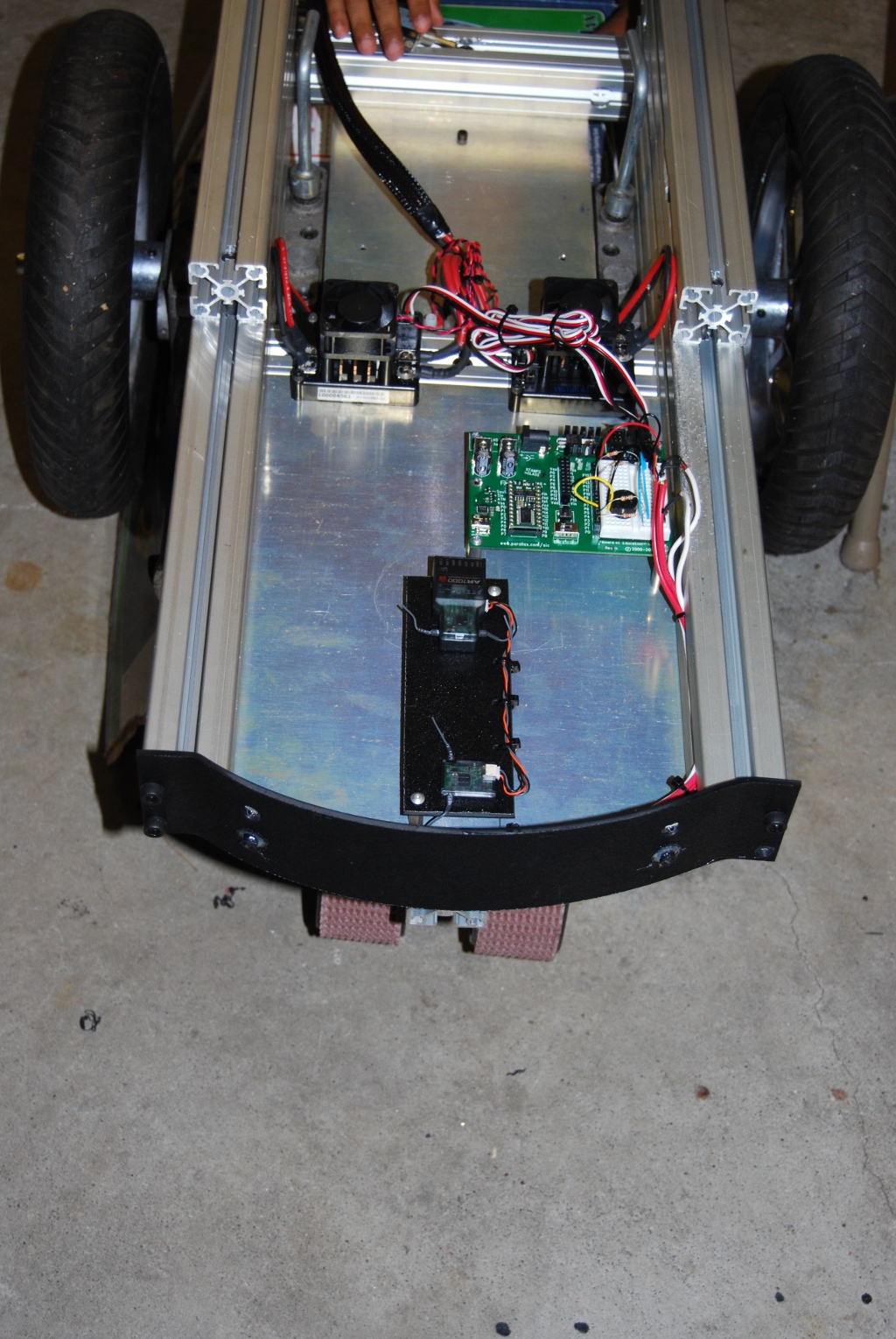
Here is the very beginning of the SuperBOE))) not even close to finished! I am using the same IR sensors the the BoeBot Uses. This is the beginning of my very first issue. The IR does not have enough range to get the Bot going in another direction before it crashes. Haven't crashed it yet though. I am going to add a PING or a Roaming PING. I also want to add some sensors in the rear for when it backs up. Any other ideas would be greatly appreciated! I will post more photos lator when I reduce their size.
Post Edited (Scott Portocarrero) : 7/17/2009 4:47:55 AM GMT
Post Edited (Scott Portocarrero) : 7/17/2009 4:47:55 AM GMT
Comments
The more you learn the more you find you don't know. It is neverending. Confucous 550 BC
Great project and inspiring, too. Makes me want to quit work for the day and work in the shop.
Ken Gracey
The hubs were not hubs at all. I made a slip sleeve out of a bronze bushing by cutting a slot out of it so it would slip over the key on the wheelchair motor shaft. The I removed the wheel bearings from the wheels (which are from a kids bicycle, also from a salvage yard). I slipped the bronze bushing into the wheel and tapped in a couple of set screws so the bushing wouldn't slip. I mounted the wheels and put a piece of scrap metal and a bolt in the end of the shaft so the wheels wouldn't slip off. Took a little bit of time but happy with the results[noparse]:)[/noparse]
So think I should use Sharp IR sensors? I am going to try using the roaming PING)) tomorrow night when I have more time to tweek on it.
I will keep this forum informed on my progress!!!!
www.youtube.com/watch?v=R8eoPPnb4NY
Thanks for the reply and the input! Anything you can tell me will help. Also thanks for the PDF, unfortunately the high range sensors are analog so I need to used an AtoD, but that shouldn't be a problem. My bot actually stops right before it hits my leg. It can get a little hairy though. There is always that though in your mind.....in this thing going to really stop or are my shin going to get bashed in.
Dave
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Dave Andreae
Parallax Tech Support·
Post Edited (Prettybird) : 7/22/2009 8:54:20 PM GMT
Parallax posesses power beyond belief.
Believe in it.
Visit me at
http://jrelectromech.services.officelive.com/default.aspx
·
Parallax posesses power beyond belief.
Believe in it.
Visit me at
http://jrelectromech.services.officelive.com/default.aspx
·
The more you learn the more you find you don't know. It is neverending. Confucous 550BC
Post Edited (Prettybird) : 7/23/2009 7:16:19 PM GMT
Nice bot!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"THE ONLY TRUE WISDOM IS IN KNOWING YOU KNOW NOTHING." - SOCRATES
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Team K.I.S.S
IF (distance > 30) THEN ' Is Object Farther Than 30 cm / ~1 foot?
GOSUB Forward_Pulse ' If Yes Go Forward
ELSEIF (distance >= 300) THEN ' Is Object Farther Than 300 cm / ~10 feet?
GOSUB Sonic_Speed_Forward ' If Yes Go Sonic
ELSE
GOSUB Ping_Around ' Otherwise Scan For Clear Path
ENDIF
I am trying to go normal speed forward if around 1 foot but if there is more than 10 feet clear I want to ramp up to full speed ahead! I know I am doing it wrong can you help. The program is attached for Subroutines.
IF (distance >= 300) THEN ' Is Object Farther Than 300 cm / ~10 feet?
GOSUB Sonic_Speed_Forward ' If Yes Go Sonic
ElSEIFF (distance > 30) THEN ' Is Object Farther Than 30 cm / ~1 foot?
GOSUB Forward_Pulse ' If Yes Go Forward
ELSE
GOSUB Ping_Around ' Otherwise Scan For Clear Path
ENDIF
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"THE ONLY TRUE WISDOM IS IN KNOWING YOU KNOW NOTHING." - SOCRATES
www.youtube.com/watch?v=aa_sV35pL2A
Nice, clean design.
Miss the wheelies in the first version though. Did you also train version II not to run over Master's foot? [noparse]:)[/noparse])
About how long will it go before the batts konk out?
- H
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
- H
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔