

I have a problem with servo timing on my BS2p
 Sticky
Posts: 42
Sticky
Posts: 42
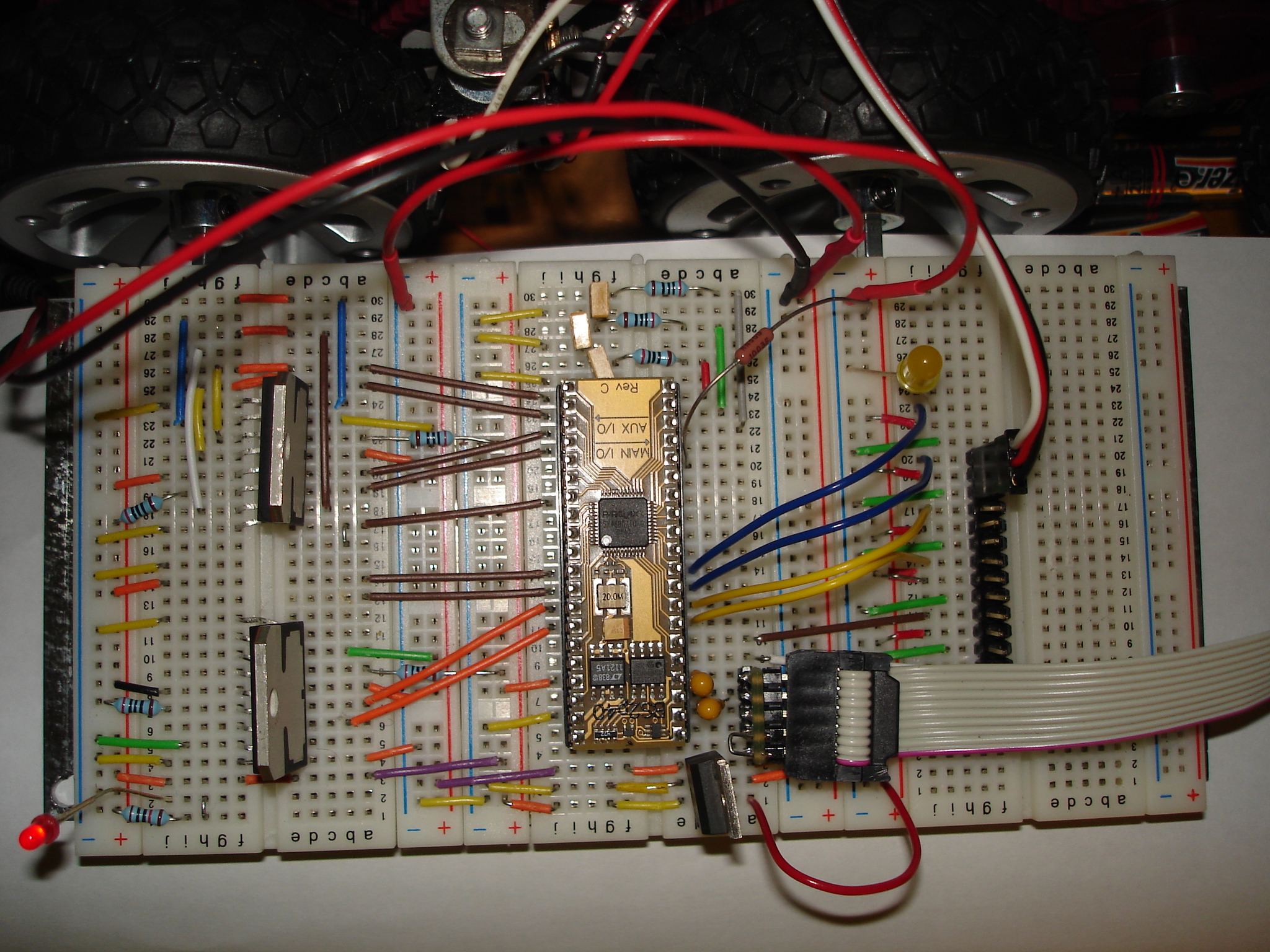
My chip seems to be acting very strange. It doesn't complete loops and slows down. I've attached the source code, th results and a pic of the breadboard. Any ideas?
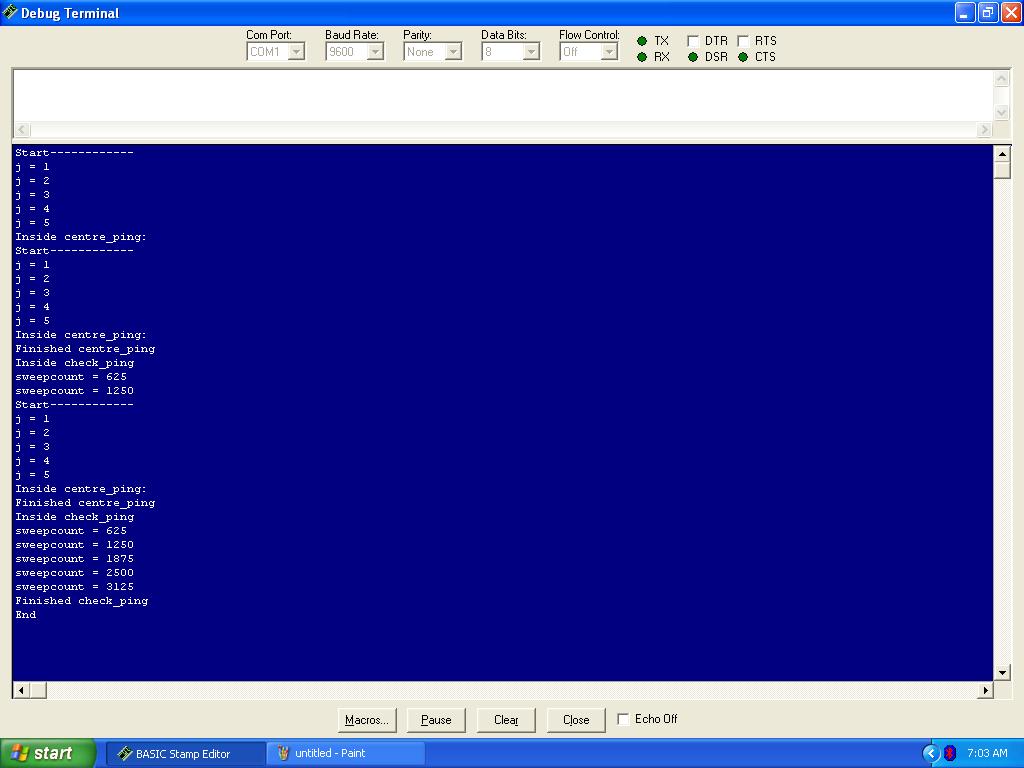
1024 x 768 - 69K
2048 x 1536 - 1M

Comments
The problem is not really with the code, but maybe the servo is drawing too much current and browning out the chip causing it to reset to the beginning.
What voltage does the servo use?
Mine are connected to 6 volts not 5 volts, and the whole thing runs from a small sealed lead-acid battery (1.3 AH).
I looked at the tech docs for the ones sold by Parallax and one doesn't provide any torque at 5volts, so needs a bit more voltage.
Also I don't think there is a six volt regulator that would work with a 7.2 volt input (possiblility not enough input voltage).
(I was up to 1am (Australian time) re-programming my robot so the sweep ultrasonic servo runs smooth.)