

Visually interacting with a simulated robot controlled by a Propeller
 Hanno
Posts: 1,130
Hanno
Posts: 1,130
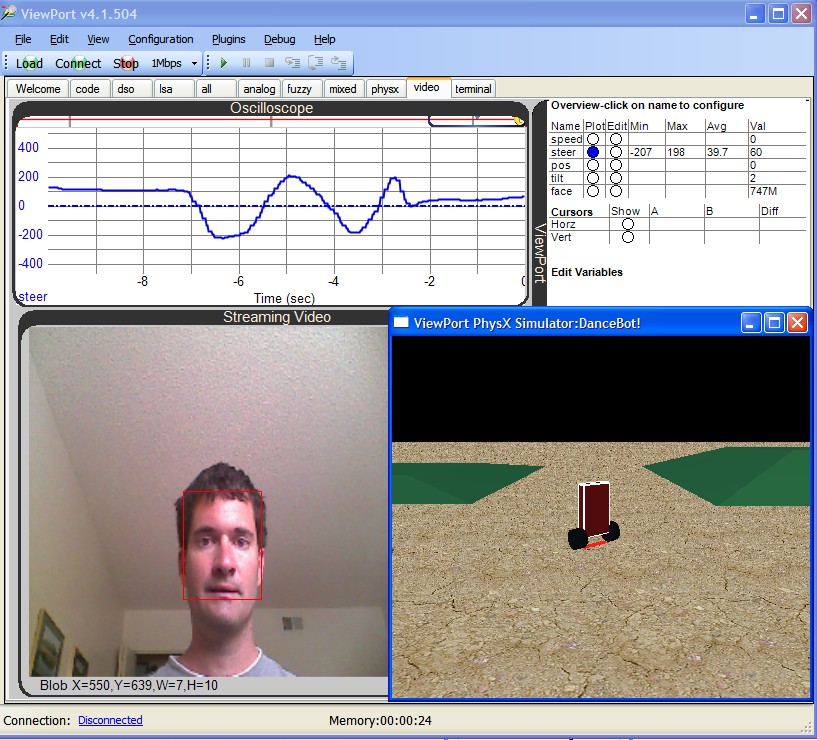
I'm making progress adding an exciting new feature to ViewPort: a simulated world controlled by a program running on the Propeller. The screenshot shows a model of my dancebot being simulated in this "dreamworld". Friction, gravity, and all other physical effects are accurately modeled and are even accelarated by certain graphic cards. Code running on the propeller receives inputs from the simulated world and uses that to control the robot- for example, changing the motor's speed. This helps people improve their real robots by experimenting in a simulated world- with their real control code. In addition, the robot is steered by the position of my face- if I'm in the left side of the window the robot turns left.
A nice way to think about it is that you can either have your robot's code control a real robot or a virtual one- the inputs and outputs should be the same...
I'll demo this at my talk at the Silicon Valley HomeBrew Club this Wednesday (4-29) and at my tech talk at Google in 2 weeks (5-12).
A nice way to think about it is that you can either have your robot's code control a real robot or a virtual one- the inputs and outputs should be the same...
I'll demo this at my talk at the Silicon Valley HomeBrew Club this Wednesday (4-29) and at my tech talk at Google in 2 weeks (5-12).
817 x 740 - 177K
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Cheers,
Simon
www.norfolkhelicopterclub.com
You'll always have as many take-offs as landings, the trick is to be sure you can take-off again