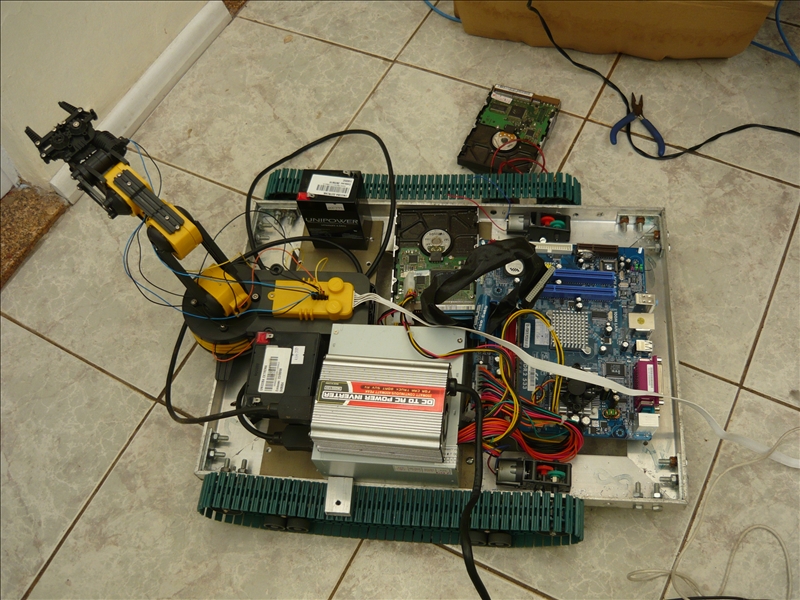
This robot operate with 12vdc bateries with a 127vac inverter ,this robot uses acelerometers to control·the position of the arms, digital compass , webcam for ident objects with 99% identifiable objects,the identifier are·programed with borland c++ builder.
modified arms to lift more height, 40 mins of operation without recharge the bateries, and much more
PhiPi: Quite true, but at least all his parts are visible in the photo. Unless my eyes deceive me, Gyro Dog appears to be little more than a dog head, balancing Segway-style atop two dog legs.·Very minimalistic, and no output to clean up!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔ ·"If you build it, they will come."
Really great robot! Good job!
Did you work up any schematics? ...Would like to see.
Any information about the integration of speech/
speech recognition, and the degree of autonomy for the
camera would be appreciated. What software are you
using? My robot dog.
Post Edited (humanoido) : 3/14/2009 11:01:00 AM GMT
for the time being I am using "E-Speaking" for voice recognition ^very good^, for other functions that use usb are compiling with c++ to builder, also the object recognition for the camera that functions very well, also uses a digital compassing, and to encoder of 0,5 degrees of resolution in the mats. in more the idea of robot she was mine, not copieie of no project

 Luiz mauricio mion
Posts: 77
Luiz mauricio mion
Posts: 77


Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
What did you use to interface the hardware to the PC board?
Are those VEX treads? How well do they hold up through cornering or on carpet?
modified arms to lift more height, 40 mins of operation without recharge the bateries, and much more
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
please go here.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"THE ONLY TRUE WISDOM IS IN KNOWING YOU KNOW NOTHING." - SOCRATES
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent, only $1.
Send cash and signature to CannibalRobotics.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·"If you build it, they will come."
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Did you work up any schematics? ...Would like to see.
Any information about the integration of speech/
speech recognition, and the degree of autonomy for the
camera would be appreciated. What software are you
using? My robot dog.
Post Edited (humanoido) : 3/14/2009 11:01:00 AM GMT
for the time being I am using "E-Speaking" for voice recognition ^very good^, for other functions that use usb are compiling with c++ to builder, also the object recognition for the camera that functions very well, also uses a digital compassing, and to encoder of 0,5 degrees of resolution in the mats. in more the idea of robot she was mine, not copieie of no project
Sorry about my english
Thank You
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔