

Are the Victor 883 Speed Controllers compatible with BS2?
 LeeChristoffers
Posts: 3
LeeChristoffers
Posts: 3
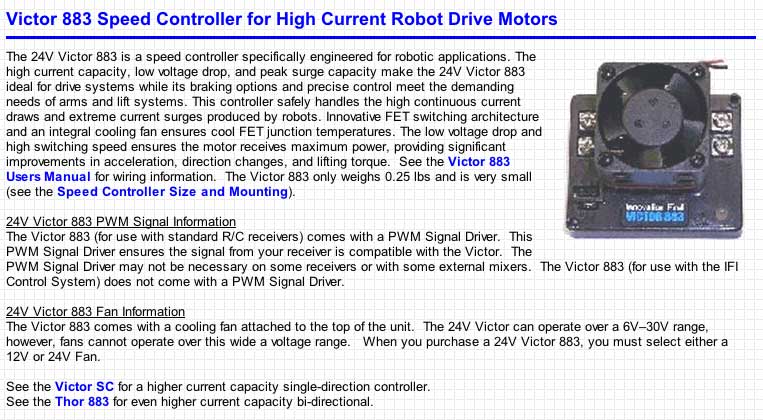
[font='PrimaSans BT,Verdana,sans-serif']I'm a senior in high school competing in the National Robotics Challenge heavyweight SUMO bot competition in April, but I cannot seem to get my Victor 883 speed controllers to function properly. To program the robot, I am utilizing Parallax's "BASIC Stamp Editor v2.2". Attached is one of the many programs I have tried, as well as the manual and data sheet for the Victor 883 speed controllers.
When turning on the robot, my speed controllers flash orange (which signals that they are not recieving a signal), and do not respond to the BOE-board that the PWM cables are wired to.· When I try to calibrate the speed controllers, the light turns a solid red (meaning that the calibration failed)after about 2 seconds. I have tried·numerous values for the output using the "PULSOUT" command, but no matter what maximum or minimum values I try, the speed controllers don't accept the signal. Is just a different value for the output that I am missing, or some other problem?·Thank you for your time.
·[/font]
NOTE: The robot is wired correctly
When turning on the robot, my speed controllers flash orange (which signals that they are not recieving a signal), and do not respond to the BOE-board that the PWM cables are wired to.· When I try to calibrate the speed controllers, the light turns a solid red (meaning that the calibration failed)after about 2 seconds. I have tried·numerous values for the output using the "PULSOUT" command, but no matter what maximum or minimum values I try, the speed controllers don't accept the signal. Is just a different value for the output that I am missing, or some other problem?·Thank you for your time.
·[/font]
NOTE: The robot is wired correctly
bsp
2K
763 x 420 - 86K
Comments
The numbers you're using in your turn_left / turn_right / forward routines don't make sense. Assuming you're using a BS2, the units for PULSOUT are 2us and servo pulses need to be in the range 1ms - 2ms usually, occasionally 0.5ms to 2.5ms. This would translate to PULSOUT values of 250 to 1250 with neutral at 750 (1.5ms). If you're using some other Stamp model (BS2p/pe/px/sx), these values will be different and the Parallax Basic Manual will give the conversion factors.
Try using the FREQOUT command. Looking quickly at the data sheet (on my way to work in a minute) it shows a way to calibrate it to your own PWM signal.
However, it seems as if the unit expects constant PWM, which the Stamp can't do and do other things at the same time. You may need an external PWM controller like the PWMPAL that Parallax sells.
Jonathan
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
www.madlabs.info - Home of the Hydrogen Fuel Cell Robot
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
There are no Undo buttons in life.
I tried using the same PULSOUT values as a servo responds to (750 for nuetral, < or > for motion)
I have also tried to re-program the speed controller, using a dummy program that simply consisted of a short high (I used 850 originally for the high), a short low (650 originally) and then nuetral (750). Didn't work.
Once the program button on the speed controller is depressed, it is supposed to be able to record the maximum and minimum values that have been input (if using an R/C controller, it would just be flipping the sticks back and forth, then returning to nuetral) and automatically adjust to it, however, they won't program correctly, as the indicator light turns red about 1-1.5 seconds after the bs2 program starts to run.
your controllers should be able to receive valid pulses. If they don't, then there's something wrong with the wiring. Maybe something broke. Maybe someone fiddled with it without you knowing about it. Who knows.
One of the most important rules for debugging, whether software or hardware, is to pay attention to what seems to be happening rather than what you believe to be true. If you see some behavior that doesn't match what you believe is true, question that belief and try to independently verify it. It may still be true and something else may be wrong, but often your assumption is wrong.
Couldn’t find any of my old programs, but we have no school today due to snow so I went downstairs got some parts and started messing around with stuff. This is what I came up with.
' This program will test different pulsout values and display what the current value is so you can record it. ' If you want it to test each value slower just change the range of counter. ' The victor is just like a servo (I think) anyway there is a three pin header signal~ vdd+ vss- ' Signal is the pin closest to the outside of the board. You will want to connect signal to pin-0 on your BOE. ' Victor LED combinations Green = CW Orange = Off Red = CCW. ' Keep in mind that there is a break/ cost jumper which may come in handy. ' Just run the program and see what numbers you get. ' {$STAMP BS2} ' {$PBASIC 2.5} counter VAR Word victor VAR Word FOR victor = 0 TO 1500 ' testing diffrent pulseout values I think 1500 is large enough GOTO speed speed: FOR counter = 0 TO 2 ' this is how long each value is tested, if you want it to go slower just make the range bigger DEBUG CR, DEC victor PULSOUT 0, victor PAUSE 20 NEXT NEXT··
I acquired four of these controllers from robotics they we old and used. And this year we got new Jaguars which have much better resolution. I’m part of a FIRST FRC team, in fact we just shipped out or robot on Tuesday. Anyway good luck on your project, if I can help anymore I’d be glad to. ··
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
There are no Undo buttons in life.
Post Edited (Tech-Man) : 2/19/2009 4:48:29 PM GMT