

The Rover controller is done!
 CannibalRobotics
Posts: 535
CannibalRobotics
Posts: 535
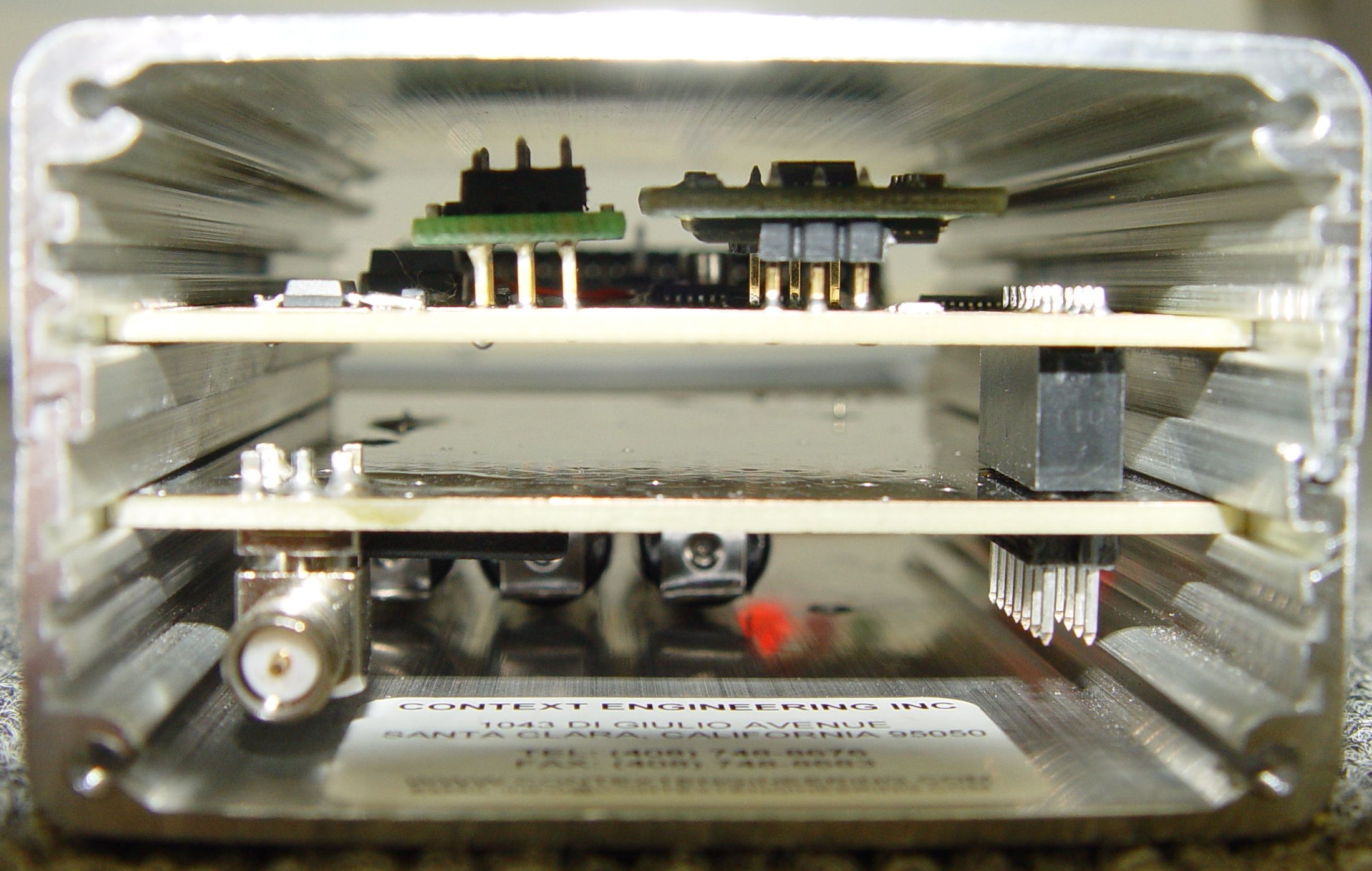
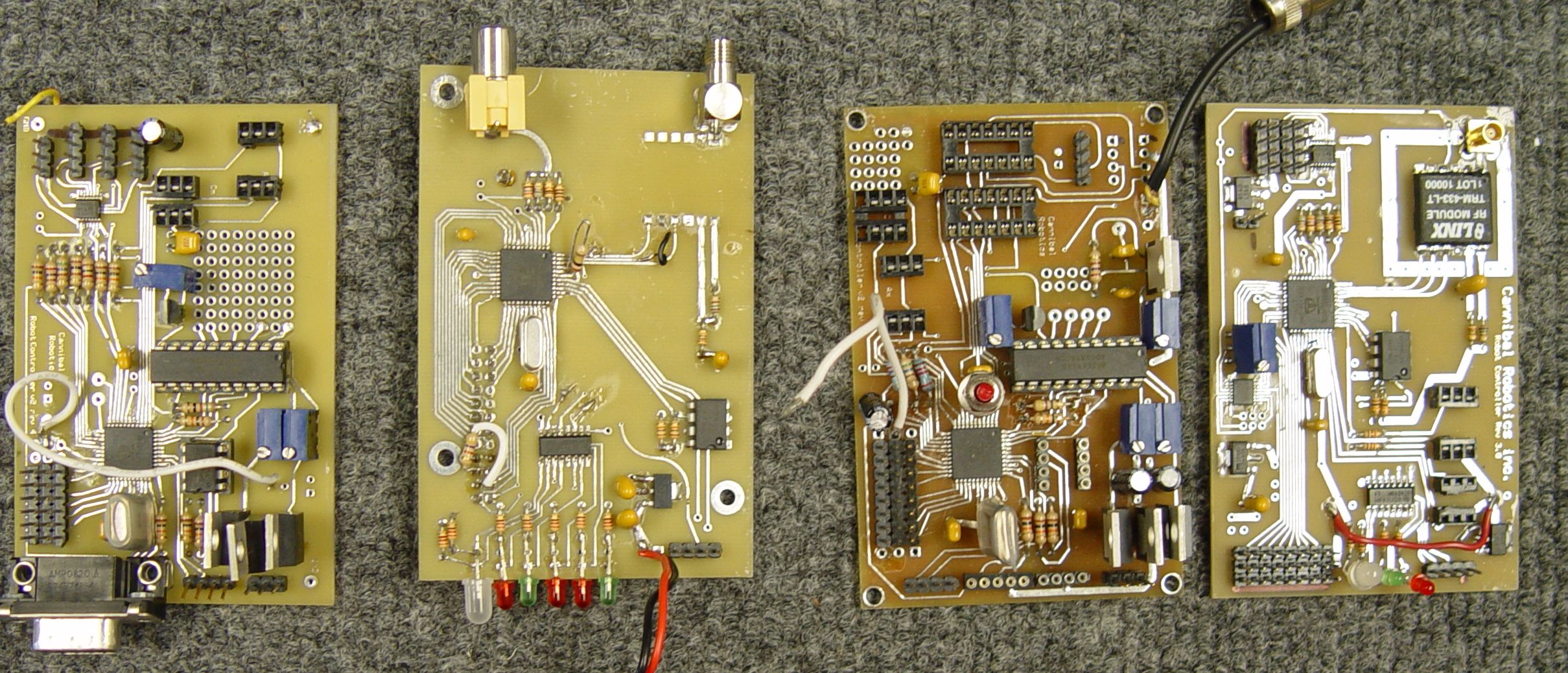
After several attempts and circuit board revisions (shown in the photos) I’ve arrived. SMD is the way to go.
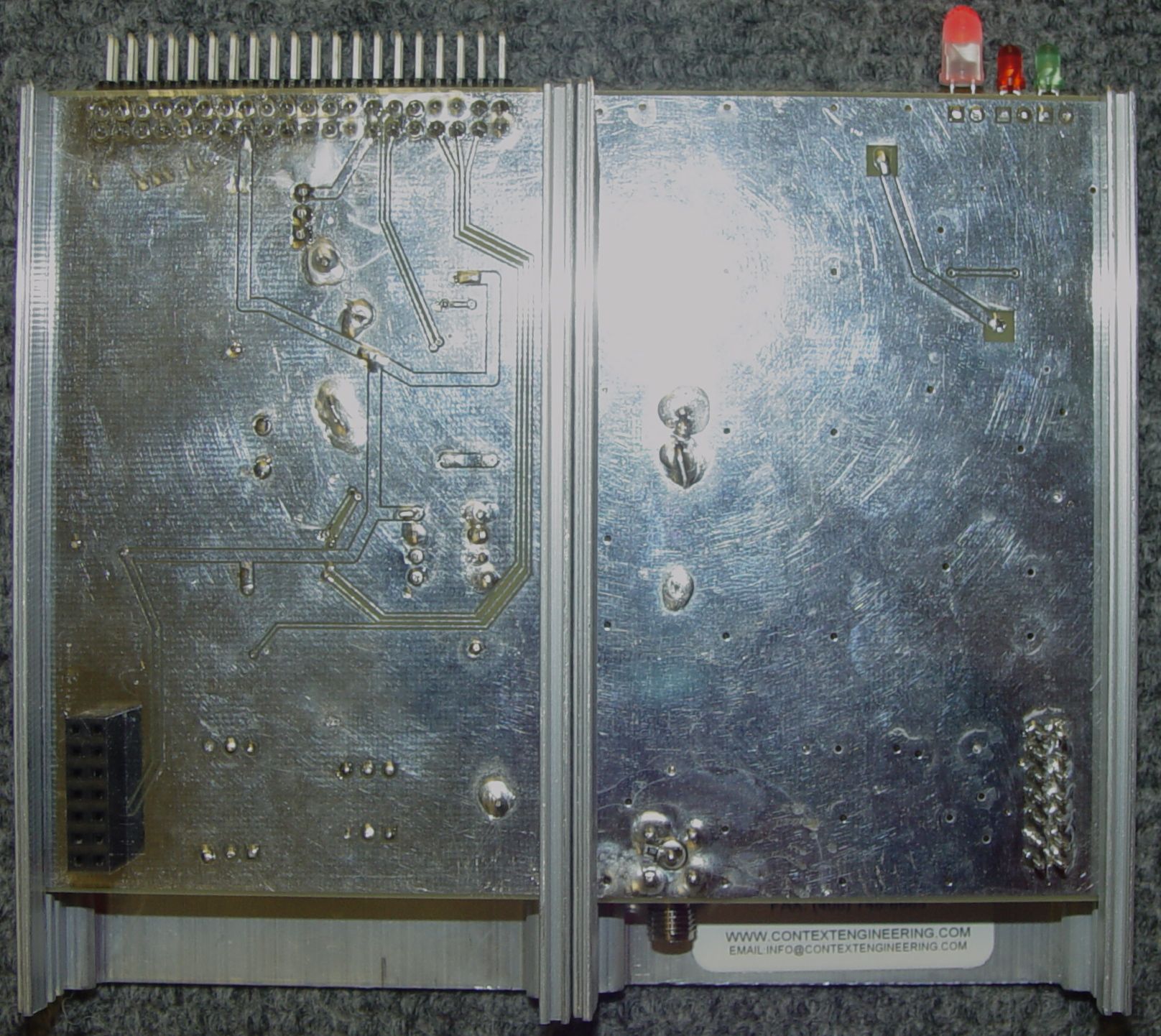
This is a rover controller that has a four channel audio & composite video multiplexor, a compass, accelerometer, 8 input A to D and several PWM outputs and a Linx 433MHz transceiver. The RF portion of the circuit is completely isolated from the digital and video noise by placing the boards back to back in the chassis. The RF board also has it’s own power supply from the three AAA batteries. In the development stages I never could get the motor transients from the servos and drive motors to keep the radio from loosing sync. All I/O including audio/video from the cameras, PWM, Prop programming and power come through the header off of the end of the CPU board. This is also isolated by the case. In the photo, there are a couple of traces that overlapped so I had to reroute them. The four AV channels allow selection between 3 cameras or the propellor video and audio defaulted to channel 0. The board has a 3.3, 5 and 12 volt power regulators for prop, compass and Axc and 12 for the cameras that plug into the header.
The major challenge of this project has been a complete rewrite of the FullDuplexSerial component.The genius of that piece of code is how it multitasks the transmit and receive lines. For this RF implementation I wanted one antenna so I had only one data line and it is constantly switching between T & R modes. This proved to be a huge challenge as there are delays between switching modes caused by the electronics then the physics of re-syncing the signals. It was also particularly challenging because timing is so tight, it had to be done in prop assembly, (Yeah Jim!) It is a packet based communication protocol that has both packet indexing and checksum for every pack. The communications code runs on it’s own cog. Other cogs communicate with it through a soft interface very much like the FullDuplexSerial. Each communication end has a buffer that is mirrored on the other side so cog A writes data to it’s transmit buffer and a few milliseconds later that data just shows up on the receive buffer at the opposite end.
I’ll post more later, probably on my website. These will include photos of the actual rover, the other end of the comm link and a few videos of the whole thing in action.
Enjoy!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent, only $1.
Send cash and signature to CannibalRobotics.
This is a rover controller that has a four channel audio & composite video multiplexor, a compass, accelerometer, 8 input A to D and several PWM outputs and a Linx 433MHz transceiver. The RF portion of the circuit is completely isolated from the digital and video noise by placing the boards back to back in the chassis. The RF board also has it’s own power supply from the three AAA batteries. In the development stages I never could get the motor transients from the servos and drive motors to keep the radio from loosing sync. All I/O including audio/video from the cameras, PWM, Prop programming and power come through the header off of the end of the CPU board. This is also isolated by the case. In the photo, there are a couple of traces that overlapped so I had to reroute them. The four AV channels allow selection between 3 cameras or the propellor video and audio defaulted to channel 0. The board has a 3.3, 5 and 12 volt power regulators for prop, compass and Axc and 12 for the cameras that plug into the header.
The major challenge of this project has been a complete rewrite of the FullDuplexSerial component.The genius of that piece of code is how it multitasks the transmit and receive lines. For this RF implementation I wanted one antenna so I had only one data line and it is constantly switching between T & R modes. This proved to be a huge challenge as there are delays between switching modes caused by the electronics then the physics of re-syncing the signals. It was also particularly challenging because timing is so tight, it had to be done in prop assembly, (Yeah Jim!) It is a packet based communication protocol that has both packet indexing and checksum for every pack. The communications code runs on it’s own cog. Other cogs communicate with it through a soft interface very much like the FullDuplexSerial. Each communication end has a buffer that is mirrored on the other side so cog A writes data to it’s transmit buffer and a few milliseconds later that data just shows up on the receive buffer at the opposite end.
I’ll post more later, probably on my website. These will include photos of the actual rover, the other end of the comm link and a few videos of the whole thing in action.
Enjoy!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent, only $1.
Send cash and signature to CannibalRobotics.
2200 x 1397 - 334K
2419 x 1038 - 550K

1353 x 856 - 149K
1616 x 1442 - 385K

1706 x 1010 - 353K
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
--Steve
I have not formally tested the wireless range yet but I should start that in earnest next week late. I'll have to get back to you on that. Linx says several thousand feet but I'm pretty sure that's not going to happen for 10Kbit which is what I've been running in the shop. The communications protocol has speed and packet size adjustment and 10Kbit is right at the top end of the spec for the LT433 transceivers. I'm thinking that range is going to be a mushy answer bracketed with speed settings and data package sizes.
I'll let you know.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent, only $1.
Send cash and signature to CannibalRobotics.
I have not formally tested the wireless range yet but I should start that in earnest next week late. I'll have to get back to you on that. Linx says several thousand feet but I'm pretty sure that's not going to happen for 10Kbit which is what I've been running in the shop. The communications protocol has speed and packet size adjustment and 10Kbit is right at the top end of the spec for the LT433 transceivers. I'm thinking that range is going to be a mushy answer bracketed with speed settings and data package sizes.
I'll let you know.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent, only $1.
Send cash and signature to CannibalRobotics.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Brian
uController.com - home of SpinStudio - the modular Development system for the Propeller
PropNIC - Add ethernet ability to your Propeller! PropJoy - Plug in a joystick and play some games!
SD card Adapter - mass storage for the masses Audio/Video adapter add composite video and sound to your Proto Board
·http://shop4.frys.com/product/2090760?site=sr:SEARCH:MAIN_RSLT_PG
Thank you!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Brian
uController.com - home of SpinStudio - the modular Development system for the Propeller
PropNIC - Add ethernet ability to your Propeller! PropJoy - Plug in a joystick and play some games!
SD card Adapter - mass storage for the masses Audio/Video adapter add composite video and sound to your Proto Board
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Signature space for rent, only $1.
Send cash and signature to CannibalRobotics.
You could probably just cut it to the right length with a bandsaw too...