

Homebrew tracked RC bot

Using some old toys, anyone remember capsela,that were sitting in my parents basement for 20 years I came up with a basic tracked bot. In it's current state it is only a RC bot, I will add some sensors and other stuff to it in the near future.
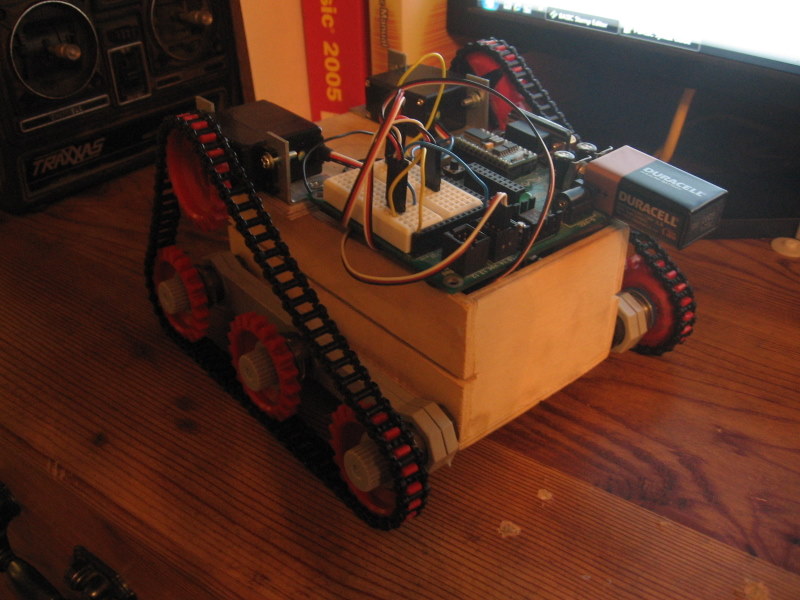
I wanted to post this as a completed project because I believe it could be usefull to people wanting to retrofit a boe bot for supplemental radio control. The use of 2 parallax continuous rotation servos and a Board of Education make this bot similiar in many ways to a boe bot. I used a serial servo controller as well in this project because I plan to add a PING))) and some IR sensors in the future for autonomy. I will try and modify the code to use the servo headers on the BOE and omit the servo controller.
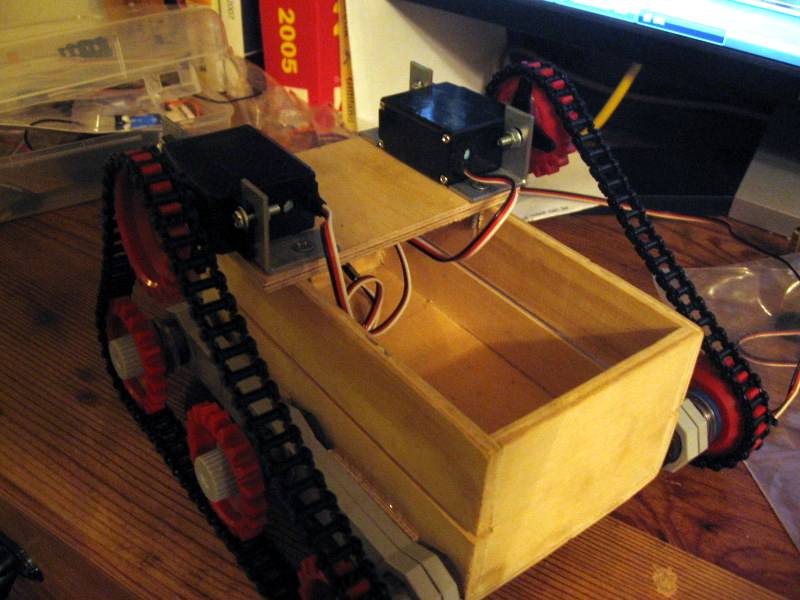
The build was pretty easy, I used a wooden box that used to hold some candles and some hobby plywood I always keep on hand as I am an avid RC plane guy, who has been known to put one in the dirt here and there. I also had some extra metal L brackets laying around from when I kid proofed all the furniture in our house that could tip. These hold the servos in place. It's all held together with basic hardware and some 5 minute epoxy to attach the idler wheel mounts and servo tray.
Some investigation was necessary on the RC gear I pulled out of my RC junk box. Using debug and pulsin I was able to determine the center pulse width of the radio gear on both channels. Due to using continuous rotation servos this bot does not have proportional control and moves at 1 speed, therefore I decided on a limit approach to control, you can see this in the attached code.
·Writing the actual program was also pretty easy. I started to approach this using Select statements but quickly ran into trouble trying to give priority to steering over foreword/backword movement.· After some trial and error I settled on concurrent IF statements with the steering conditions first, these conditions all·poin to a specific sub routine, the sub always returns to the top of code to check for new input.
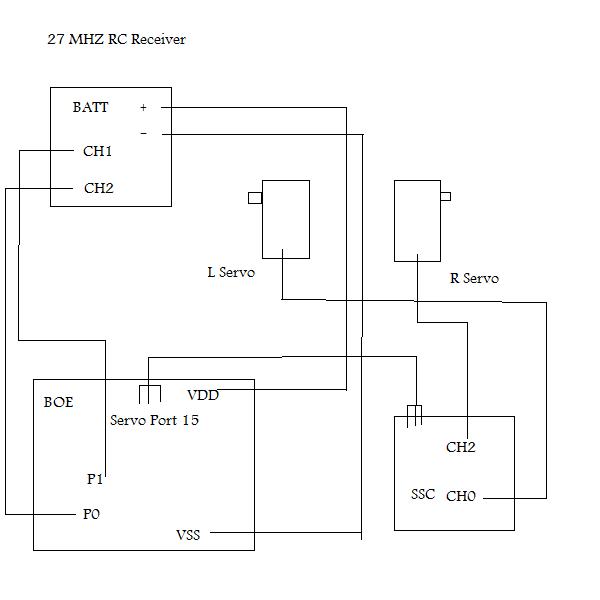
Attached is a rough schematic, 2 pics 1 after the build and 1 with BOE and other guts fitted,·and the documented bs2 code.
If you have any questions please post or contact me via forums, enjoy!
Post Edited (KB3JJG) : 1/5/2009 5:18:01 AM GMT
I wanted to post this as a completed project because I believe it could be usefull to people wanting to retrofit a boe bot for supplemental radio control. The use of 2 parallax continuous rotation servos and a Board of Education make this bot similiar in many ways to a boe bot. I used a serial servo controller as well in this project because I plan to add a PING))) and some IR sensors in the future for autonomy. I will try and modify the code to use the servo headers on the BOE and omit the servo controller.
The build was pretty easy, I used a wooden box that used to hold some candles and some hobby plywood I always keep on hand as I am an avid RC plane guy, who has been known to put one in the dirt here and there. I also had some extra metal L brackets laying around from when I kid proofed all the furniture in our house that could tip. These hold the servos in place. It's all held together with basic hardware and some 5 minute epoxy to attach the idler wheel mounts and servo tray.
Some investigation was necessary on the RC gear I pulled out of my RC junk box. Using debug and pulsin I was able to determine the center pulse width of the radio gear on both channels. Due to using continuous rotation servos this bot does not have proportional control and moves at 1 speed, therefore I decided on a limit approach to control, you can see this in the attached code.
·Writing the actual program was also pretty easy. I started to approach this using Select statements but quickly ran into trouble trying to give priority to steering over foreword/backword movement.· After some trial and error I settled on concurrent IF statements with the steering conditions first, these conditions all·poin to a specific sub routine, the sub always returns to the top of code to check for new input.
Attached is a rough schematic, 2 pics 1 after the build and 1 with BOE and other guts fitted,·and the documented bs2 code.
If you have any questions please post or contact me via forums, enjoy!
Post Edited (KB3JJG) : 1/5/2009 5:18:01 AM GMT
800 x 600 - 128K
800 x 600 - 106K
600 x 600 - 25K

Comments
' {$STAMP BS2}
' {$PBASIC 2.5}
thr VAR Word
whl VAR Word
rc:
PULSIN 14,1,whl
PULSIN 15,1,thr
PULSOUT 12,whl
pulsout 13,thr
pausse 20
GOTO rc