

IMU Upside Down
 Jay Kickliter
Posts: 446
Jay Kickliter
Posts: 446
I've been using the IMU object paired with the Sparkfun 5 Degree of Freedom board to make a rudimentary artificial horizon. I can't get it to work upside down. Is this an inherent flaw?
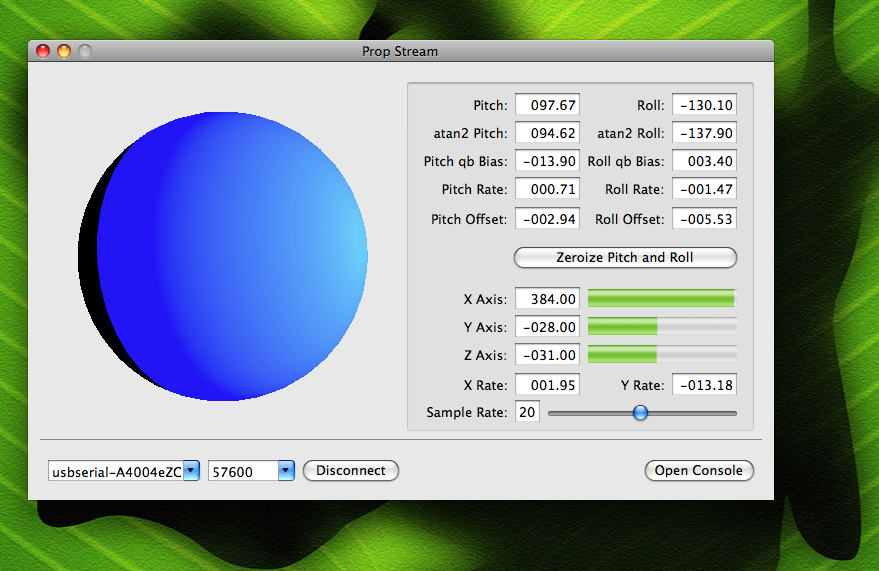
What's happening is that whenever either pitch or roll passes +/- 90 degrees the other axis shoots from around 0 degrees to almost +/- 180 degrees. So I can never get the sphere to go upside down.
A video would be better, but I'm attaching a photo. What's happening in the photo is that the board is being held with a level roll but a pitch of about 90 degrees away from me, so I should be seeing all black, but since the board is saying that there is also about 180 degrees of roll, the sphere rotates around and I see the blue side.
Post Edited (Jay Kickliter) : 12/31/2008 3:21:05 PM GMT
What's happening is that whenever either pitch or roll passes +/- 90 degrees the other axis shoots from around 0 degrees to almost +/- 180 degrees. So I can never get the sphere to go upside down.
A video would be better, but I'm attaching a photo. What's happening in the photo is that the board is being held with a level roll but a pitch of about 90 degrees away from me, so I should be seeing all black, but since the board is saying that there is also about 180 degrees of roll, the sphere rotates around and I see the blue side.
Post Edited (Jay Kickliter) : 12/31/2008 3:21:05 PM GMT
879 x 571 - 396K
Comments
**
Anyway, once you cross the magic mark, the whole thing goes out of whack.
**
IMU_-_Archive__Date_20081.03.09__Time_21.22.zip
{{ IMU Demo }} CON _clkmode = xtal1 + pll16x _xinfreq = 5_000_000 #0, WHITE,CYAN,RED,PINK,BLUE,GREEN,YELLOW,GRAY 'Standard colors OBJ term : "PC_Interface" imu : "IMU" fp : "FloatString" fm : "FloatMath" PUB Main | b , r 'start the interface term.start(31,30) term.setcol(YELLOW) term.str(string("IMU Demo...")) term.setcol(CYAN) term.out(0) r := imu.start(25,26,27) fp.SetPositiveChr(" ") fp.SetPrecision(4) waitcnt((clkfreq *3) + cnt) repeat b :=0 setpos (0,b++) r := imu.get_angle_Pitch term.str(string("get_angle_Pitch ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_q_bias_Pitch term.str(string("get_q_bias_Pitch ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_rate_Pitch term.str(string("get_rate_Pitch ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_angle_Roll term.str(string("get_angle_Roll ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_q_bias_Roll term.str(string("get_q_bias_Roll ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_rate_Roll term.str(string("get_rate_Roll ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_y_rate term.str(string("get_y_rate ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_x_rate term.str(string("get_x_rate ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_y_axis term.str(string("get_y_axis ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_z_axis term.str(string("get_z_axis ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_x_axis term.str(string("get_x_axis ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_a2tan_angle_Pitch term.str(string("a2tan_angle_Pitch ")) term.str (fp.FloatToString(r)) term.str(string(" ")) setpos (0,b++) r := imu.get_a2tan_angle_Roll term.str(string("a2tan_angle_Roll ")) term.str (fp.FloatToString(r)) term.str(string(" ")) waitcnt(clkfreq/10 + cnt) PRI setpos(px, py) term.out(10) term.out(px) term.out(11) term.out(py)