

Motion: Speed and Distance Tracking
 T Chap
Posts: 4,260
T Chap
Posts: 4,260
Hey guys, I had this idea today when thinking of ideas to monitor positioning when using an encoder on a motor.
I am working on a project where the Prop controls a BLDC(brushless DC motor) driver, and have included a hall sensor on the motor driver board to check current, and in the case of exceeding some threshold, the motor gets braked, or reverses, whatever is programmed.
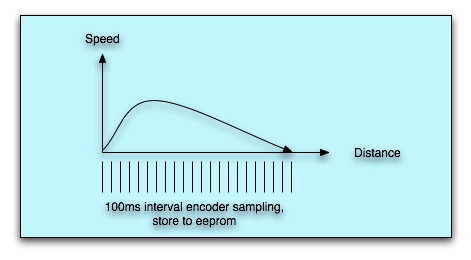
As a redundant safety measure, I had this other idea of "Learning" the motion, where the Prop begins logging the encoder count on Start of Motion, using an example of logging the position every 100ms. The positions are stored in an additional eeprom.
So for the actual process, first set both the current limit, the distance, the accel and decel rates. After the desired motion is achieved, run Learn, which stores the data. This learning process could be simply programmed into the Homing Setup stage.
After the data is stored, on every motor move afterward, launch the respective MotorTracking method, which compares the current position to what was stored in Learn Mode, and build in some tolerance value + and -. If the distance traveled is + or - what it should be based on the stored data, there is a fault.
No real question here, just seeing if anyone had every done this before, or had any opinions.
Post Edited (Originator) : 9/22/2008 11:33:26 PM GMT
I am working on a project where the Prop controls a BLDC(brushless DC motor) driver, and have included a hall sensor on the motor driver board to check current, and in the case of exceeding some threshold, the motor gets braked, or reverses, whatever is programmed.
As a redundant safety measure, I had this other idea of "Learning" the motion, where the Prop begins logging the encoder count on Start of Motion, using an example of logging the position every 100ms. The positions are stored in an additional eeprom.
So for the actual process, first set both the current limit, the distance, the accel and decel rates. After the desired motion is achieved, run Learn, which stores the data. This learning process could be simply programmed into the Homing Setup stage.
After the data is stored, on every motor move afterward, launch the respective MotorTracking method, which compares the current position to what was stored in Learn Mode, and build in some tolerance value + and -. If the distance traveled is + or - what it should be based on the stored data, there is a fault.
No real question here, just seeing if anyone had every done this before, or had any opinions.
Post Edited (Originator) : 9/22/2008 11:33:26 PM GMT
471 x 260 - 26K