

Newbie question: Why do my servos only run half speed?
 Keezinator
Posts: 21
Keezinator
Posts: 21
I·am having a question: Using "Servos for PE Kit.spin" 1.4, only speed values between -200 and 200 seem to have different speeds.
Below -200 or above +200 the servos seem to have the same (maximum) speed.
Is this 'normal' or am I doing something wrong? The servos object allows speeds from -1000 (.5 ms pulselength) to +1000 (2.5 ms pulse length).
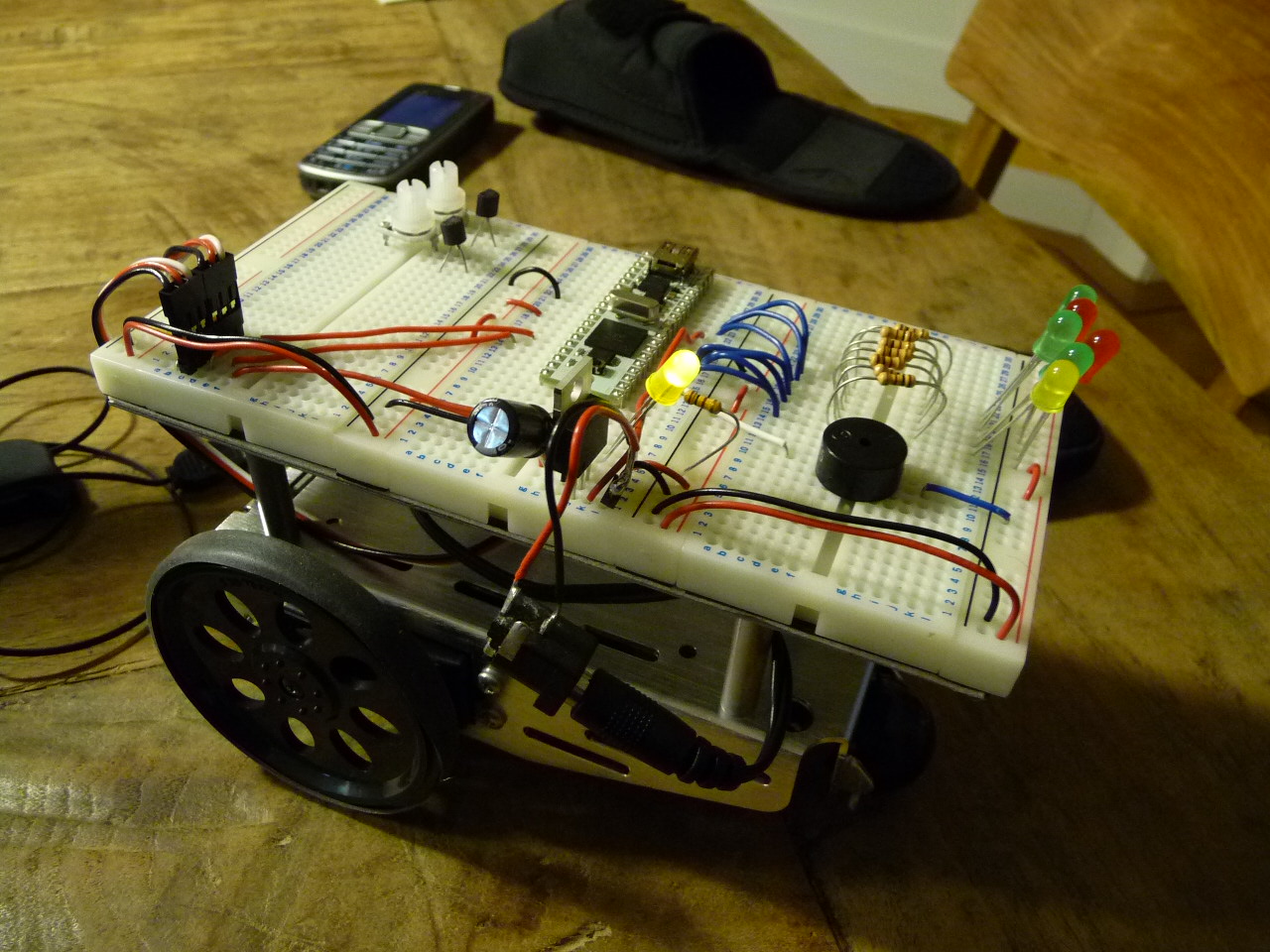
I·am using a propstick USB with the propeller education kit on top of a BOE bot chassis (and using the BOE bot servos).
I don't have any other power consumers on the board and I am driving the servos from the 5V power supplied by the regulator on board, while the controls are connected directly to the propstick output pins.
The whole thing is powered by 4 AA batteries...
Attached a picture of my setup ...
Post Edited (Keezinator) : 8/27/2008 4:02:19 PM GMT
Below -200 or above +200 the servos seem to have the same (maximum) speed.
Is this 'normal' or am I doing something wrong? The servos object allows speeds from -1000 (.5 ms pulselength) to +1000 (2.5 ms pulse length).
I·am using a propstick USB with the propeller education kit on top of a BOE bot chassis (and using the BOE bot servos).
I don't have any other power consumers on the board and I am driving the servos from the 5V power supplied by the regulator on board, while the controls are connected directly to the propstick output pins.
The whole thing is powered by 4 AA batteries...
Attached a picture of my setup ...
Post Edited (Keezinator) : 8/27/2008 4:02:19 PM GMT
1280 x 960 - 301K
Comments
Somebody with a fuller understanding of the PropStick and Protoboard differences may help.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
JMH - Electronics: Engineer - Programming: Professional
Post Edited (Quantum) : 8/27/2008 4:06:35 PM GMT
what I remember is that the "Servos for PE Kit.spin" code defines the pulse length in terms of the clock frequency, so any frequency should work.
its is 80 MHz by the way ...
any idea what max speed (RPM) I shoud expect from those Servos?
Graham
Max speed is about 60RPM at 6V.
So I bypassed the regulator and set the pulse length to MAX and established that the servos are running at about 60RPM.
So all is working fine.
Next I tried to establish at what pulse wide maximum speed was reached: 1.5 (neutral) + .4 ms = 1.9 ms (approximately) where the max pulse width supported by the servos object is 2.5ms. So it tops at about 40% between min and max pulse width...
Right! So different servos seem to reach max speed at different pulse width (apperantly)...
Anyone know a good URL explaining all this (in depth)?
For more information, start with the Wikipedia page on radio control (R/C) servos.
As you can see it's highly non-linear, with most of the change occurring around the middle of the curve.
-Phil
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
'Still some PropSTICK Kit bare PCBs left!