

Project: Autonomous open Ocean Sailboat
 Sniper King
Posts: 221
Sniper King
Posts: 221
By request, i have started this thread.· I do think it would be really cool to have the incredible experience of the forum on this project.·
Some of you might say...Oh,God1 not another project from ComancheSniper!· Almost all of my other projects are for work and going to Iraq for use by our boys over there. This one is my personal fun project (I set myself up for these monster project!)
This is a big one.· I do feel, however that it is more than doable and I think, in all honesty, that the propeller side of things will be the most fun!
PROJECT:OPEN OCEAN AUTONOMOUS SAILBOAT
Hull Design: 10 foot Carbon Fiber
Sail Design:·Rigid wing adjustable foil carbon fiber
Autopilot: Propeller based (AquaPilot?)
Sensors:
Communication:
Packet HAM Radio
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
Some of you might say...Oh,God1 not another project from ComancheSniper!· Almost all of my other projects are for work and going to Iraq for use by our boys over there. This one is my personal fun project (I set myself up for these monster project!)
This is a big one.· I do feel, however that it is more than doable and I think, in all honesty, that the propeller side of things will be the most fun!
PROJECT:OPEN OCEAN AUTONOMOUS SAILBOAT
Hull Design: 10 foot Carbon Fiber
Sail Design:·Rigid wing adjustable foil carbon fiber
Autopilot: Propeller based (AquaPilot?)
Sensors:
- Wind Direction
- Wind Speed
- Tilt - Accelerometers
- GPS
- Tilt compensated Compass
- Rate Gyro
Communication:
Packet HAM Radio
- VHF ISS packet repeater
- 10 meter packet
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
1059 x 826 - 30K
Comments
-Phil
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
'Still some PropSTICK Kit bare PCBs left!
Have you done any calculations on what kind of battery power, solar arrays, etc. you will need for operating the actuators? How many days are you planning on this thing riding the seven seas?
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
It might be the Information Age but the Eon of Ignorance has yet to end.
For a proof of concept you could do a stitch-together plywood & fiberglass hull
Are you planning on using an independent·weather vane for wind direction on top of the wing? or do you have something else in mind. Also curious if or what low speed airfoil(s) you might use (nice airfoil database).
Post Edited (plx88) : 8/26/2008 11:40:29 PM GMT
I will be keeping an eye on this [noparse]:)[/noparse] Best of luck!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
-Alec
My our page
Carbon Fiber:· You are totally right about this.· Fiberglass will probably be where we go with this.· The hull needs to be thick. The seas we encounter will be hostile at best.· i do nopt have the vacuum bagging stuff I used to.· I have done extensive vacuum bagging during a UAV project I headed.· i have never baggd something tis big before but I know what to do.· The hull layou will be CAD designed be hand cut.· We will be starting with a mold for this hull.· this will be the most difficult of the design but totally doable.· This will also allow for multiple boats eventually.
Compass: We need to have a tilt compensated compass for sure even if this has to be a stand alone unit.· We also need to know the orientation of the craft.· Knowing the orientation of the craft is important for a few reasons.· I want to control the roll of the boat.· I have seen so many videos of USVs rolled on there side cruising through the water.· I am not looking for speed here.· Control is more important.· The mast head fly (Wind direction sensor)· needs to be in the wind to give us the appropriate sail trim.· If we can keep it around a 45 degree tilt we will have better control of the sails and more efficient propulsion.·
Airfoil:· The airfoil has a cam in it.· This is my own design here.· When the cam is centered, the airfoil is totally symetrical.· When the cam is·rotated in one direction or the other it transforms into an airplane wing in either direction where on side is flat and the other is curved like a wing.· This is a huge mistake in the wing sail designs that i have seen other amateurs make.· The wing is exponentially more efficient this way.· So in answer to your question about airfoils, I think the most similar wing would be the Clark-Y.
Control:· There will be PID loops everywhere.· Heading control, turn rate, sail trim, tilt compensation.· However, in order to stay inside our power budget, we will doing some averaging in things like wind speed,wind direction,·and heading.· This will keep our actuator from running contantly and chewing up our batteries.· This will be a trial and error testing phase when we get there.· Also these things will be adjustable as the wind speed increases because we will need some quick response in high seas.·
We also will need a magnetic declination database in order to compensate earthwide for compass error as opposed to GPS heading.· I think we might be able to do this on the fly if the boat is moving fast enough to get a good gps heading and then compare it to a compass reading.· I prefer to use the compass though.· This will give us much higher control rates.· Also we will need 3 rate gyros.· One for instant tilt compensation and two for turn rate at funny angles to keep us straight through the water.
The rudder needs to have some authority but not so big that it is hard to turn.· Instead of the rudder attached at the leading edge to the hull it will be knotched so the attachment point is just in front of the centerline so that it wants to be straight but not so much that it wil be hard on the actuator.· This will help our battery life greatly.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
BINGO! www.soe.ucsc.edu/~elkaim/Documents/ElkaimDesignCat.pdf This guy seems to have done his homework. Lots of good ideas in his papers.
Full length version of the above paper
A electric motor and propeller might be a good idea too. While sailing works well on open water it's MUCH more difficult to sail into harbor or a dock. So a small motor with a folding propeller would be useful. An auxiliary motor would also be a useful spot to dump excess solar power.
Marty
P.S. Only 10ft long on the open ocean? Hope the boat's sealed up as well as a submarine!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Lunch cures all problems! have you had lunch?
Post Edited (Lawson) : 8/27/2008 5:25:27 PM GMT
Have you talked to people who actually sailed both oceans in one man boats? To me getting their real world experience would be a must have.
A friend of mine worked on robot subs a while back and he told me their biggest challenge was getting batteries that could keep the thing running long enough to do an open water mission. So I have a question - could a "sail" actually be designed as a kind of vertically rotating windmill made in such a way so that it not only directs the flow of air and provides propulsion for the boat but also cranks a generator and provides electric power for your control systems? Seems to me I saw something like this years ago - or maybe I just dreamed about it. Seems to me the boat used two such rotating "sails". But I can't recall much other than that.
just a thought,
Mark
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
It might be the Information Age but the Eon of Ignorance has yet to end.
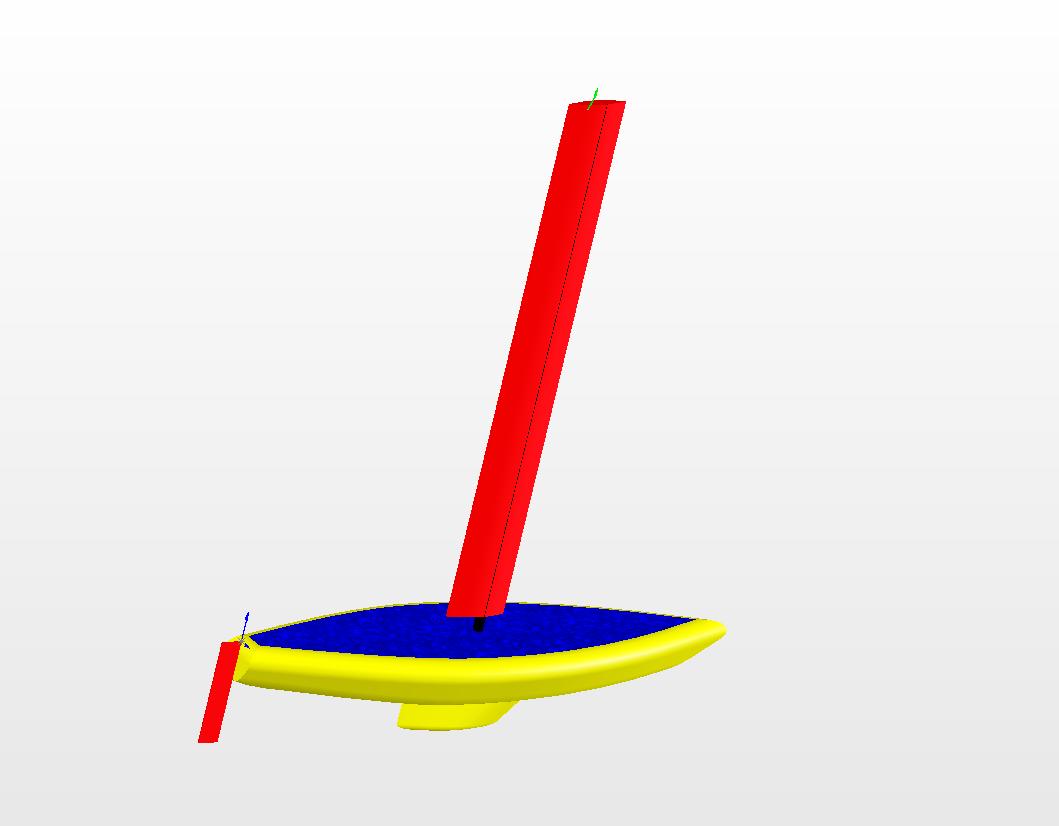
In the image at the top of this document, solar panels are employed all over the deck of the vehicle for power.· The keel of the vehicle is all batteries.· These will most likely be sealed gel cells... a bunch!· This battery system should allow for enough power even on cloudy days though the calculations will have to be done after all the actuators and control electronics is done.
a good point is made on the rotating sail idea.· Will look into that.· That may be the ultimate answer.
The hull will be completely sealed and thick for the open ocean adventure.· 10 foot was chosen as a size that can take some high seas while keeping the craft small enough to handle some serious beating and maintaining integrity including the sail.· I imagine in worse case senario, the craft will certainly be at the mercy of the sea.· i am hoping that after things calm down, the craft wil right itself and continue mission.· Hence, the over building of everything.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
Marty
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Lunch cures all problems! have you had lunch?
This is a truly magnificent addition to this project!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
I love what you are doing Sniper King. It sounds really neat.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
Well, he could always camouflage it as a deck chair from a Disney Cruise and nobody would think anything out of the ordinary was afloat.
We live onboard our 50 traditional Spay and have done for over·8 years.
This new version is far from being complete but most functions are working version.
You might fine its·useful starting point fot other types of pilots
Pilot_lcd.spin is the top object
Regards
Ron
BTW I can provide curciut details, but they should be self explanitory. Enjoy
Post Edited (Ron Sutcliffe) : 8/28/2008 3:13:03 AM GMT
You can acomplish the same thing by using 1 airfoil with a progressive flap using 2 "Skin Hinges". As a result of the skin hinges I think you would increase the strength of your main wing, reduce·it's weight and simplify the design.
Skin hinges are made with a layer of kevlar on the inside of a fiberglass skin. (but no carbon)
Chord=24"
Root Thickness max=5.04"
flap length=3.12"
Length=12'
These dimensions were chosen to create a massive amount of strength.· This design has to sustain some incredible forces at times.·
Now, because I live in AZ, my initial testing will be on a lake with a chase boat.· I am stating to think this might have to be a littoral vessel for now as the strength necesary to support the sail in high seas will have to be tested in depth the see what it can take.
I will be posting a CAD drawing of the·wing and the rib structures of the wing.· One of my main concerns is the pivot point.· This has to be really strong; not only the bearings that allow the 360 degree rotation but the attatchment point to the hull.·
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
Self righting is essential of course and you might want to consider hull designs with a small draft to avoid running aground.
Though very different from your design a boat that is designed to just keep on working in all conditions is this one:
www.microcruising.com/paradox1.htm
It allows the pilot to control everything from inside while keeping dry, has no keel or dagger/centre board and self rights, the sail can also be reefed from inside.
Whatever you go for in your design you should lean towards reliability rather than performance. Also design in flexibility, for given abuse you can make a lighter structure if it is flexible rather than trying to use belts and braces. Just look at saplings swaying in the breeze [noparse]:)[/noparse]
Cheers,
Graham
The following notes relate to our own setup.
The apparent wind is sensed using a vertically mounted Vane with a counter weight consisting of a 3/8 Dai 316 stainless steel rod. A small weight can be slid up and down the rod to adjust the sensitivity of the vane for varying sea conditions. The vane is adjusted to face into the apparent wind. The Vane tilts in response to the difference in air pressure on each side. It operates on the shaft of a 10-k wire wound Pot. (Overall length of the vane including the counter weight Rod is approximately 24 inches . From my experience wind direction systems which rotate around a vertical shaft do not provide suitable feed back for apparent wind steering. These types need to be mounted in clean air often high up the mast hence they are more sensitive to sea state. The 360 degree Pots are available (from Davis, I think) if you must do it that way. We have purchased two commercially built Auto-Pilots in the last eight years 8 years. (both made in the USA) they failed to steer satisfactorily using the top of mast integrated wind instrument. Hence we built out first pilot with a Basic Stamp, some years ago and used it just for sailing to apparent wind. Parsing NMEA sentences requires something better than Basic Stamp.
The Compass that I purchased from Parallax is not mounted on gimbals at this stage. I have been surprised how well it fairs when I average the readings. We do not heel much over 15 degrees (not for any length of time anyway) so its not a problem. Compass errors are handled by rudder damping. (The helm does not respond to intermittent errors)
That said, I know of no marine compass of the electronic type that is used for navigation that is not gimbaled. It’s a job to do before we cross the Indian Ocean.
The rudder feed back is another 10-k pot and attached to the rudder quadrant.
A separate 5 volts supply is used across the Pots. The Wiper returns back to ADC0832 on PROP Demo board. Cabling in both cases is about 6 meters. Both supplies share a common ground (goes without saying)
There are four steering modes steering modes as follows, Standby, Steer current compass heading and Steer to waypoint. The following data can be setup. Sea State, Vane Damping, Rudder gain and Rudder Limit.
This information is provided on the basis that you may find it useful.
Regards
Ron
Post Edited (Ron Sutcliffe) : 8/30/2008 4:50:51 AM GMT
A little side point, this boat can actually navigate in reverse by reversing the tail and flap.· This is because we are just changing the angle of attack to the other side of the wing.· This will only cause lift in the other direction and with good computer control, instead of a rudder, we have a canard.· Inefficient at best but the boat will go backwards!· This is unheard of in the traditional sailboat without the crew pushing the boom out at a weird angle into the wind.
Another advantage here is our angle into the wind.· Most sailboat with traditional sails can tack into the wind up to about 30 degrees.· this boat can do 15 degrees!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
Initial autopilot:
GPS and wind sensor only.
This should be more than enough to navigate a lake.· Since the GPS will give us heading regardless of tilt this seem like a logical starting point.· In retrospect, I wanted a compass but I think a dual rate gyro is actually better suited to keep us straight.· The wind sensor is necesary to keep the boat out of the irons (pointed into the wind and thus drifting backwards)
OBEX objects to use
FullDuplexSerial
GPS_IO_mini_PNAV
Float32Full
Servo32v3
For communication for now.· We will be using a DIGI (maxstream) Xtend 1 watt module.
This will give us realtime telemetry and manual control over all the servos/actuators.
For control software, i am writing a Ground (Water?) control station with maps in case we get a little far out there!· This software will give us absolute control of the craft or if everthing is working and we want to dock, we can take over rudder control and then push the big red stop button and hit the brakes (reverse thrust) until we are stopped.· Imagine navigating a slip under sail... perfectly!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group
edit; I reduced the image width to 800 pixles for better reading.
Post Edited (Capt. Quirk) : 8/30/2008 9:42:51 PM GMT
I am working on a line of position idea.· line of position is the ray created between two waypoints.· Upon reaching a waypoint, the autopilot immediately calculates the reverse bearing from the current waypoint to the next.·using the distance and the angle of the craft off of the reverse bearing we can calculate the distance the craft is from the line of position.· Now we can create an acceptable lane the the craft can operate inside of.· When the craft reaches a max left or right of the distance from center, the craft will tack.· If the craft reaches a point where a tack is possible that will carry it to the waypoint, it will tack prior to reaching·the left or right max and sail to the·waypoint.
Things are tight in the King household.· Two kids and one on the way make it hard to justify spending money on the materials necesary to build a full size boat.· To start, we are going to build this·as a scale model.· This will save a large amount of money especially in the cost of actuators.· We will be able to use servos.· So the boat for testing purposes will be 3 feet long with a 3.5 foot sail.· I can start on this almost immediately.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·- Ouch, thats not suppose to be hot!··
Michael King
Application Engineer
R&D
Digital Technology Group