

Another Modified BOE-BOT

Getting ready for the robotics club I will be starting this fall at the school where I work, I decided that it would be a good idea to have a robot that could do the advertising. All I wanted was a BOE-BOT that could carry as sign announcing the club. The plan was to have it wander the halls and let the students see what could be done. As with most projects I had a little bit of “scope creep” during the build – program – test cycles. The final result is shown in the pictures below.
·
The unit is based on a BOE-BOT chassis with the following added components:
·
The unit has two programs completed.
·
The first program posted combines the IR Remote operation with the roaming with Ping. The robot will wait for about 20 seconds to see if the infrared remote is being used. If it doesn’t see the remote it will start out on its own and wonder around looking for a clear path.
·
The second set of programs allows the robot to be controlled using a game controller attached to a PC. I have a small TV located next to the PC to receive the images from the security camera attached to the pan/tilt sensor.
·
After I showed it to our Superintendant, she suggested we have it make an appearance at the start of school assembly. We’ll have the camera feeding into the projectors on either side of the stage so the students will get a “robots eye view” as it comes on stage to meet the Superintendant.
Post Edited (MSDTech) : 6/28/2008 3:39:52 PM GMT
·
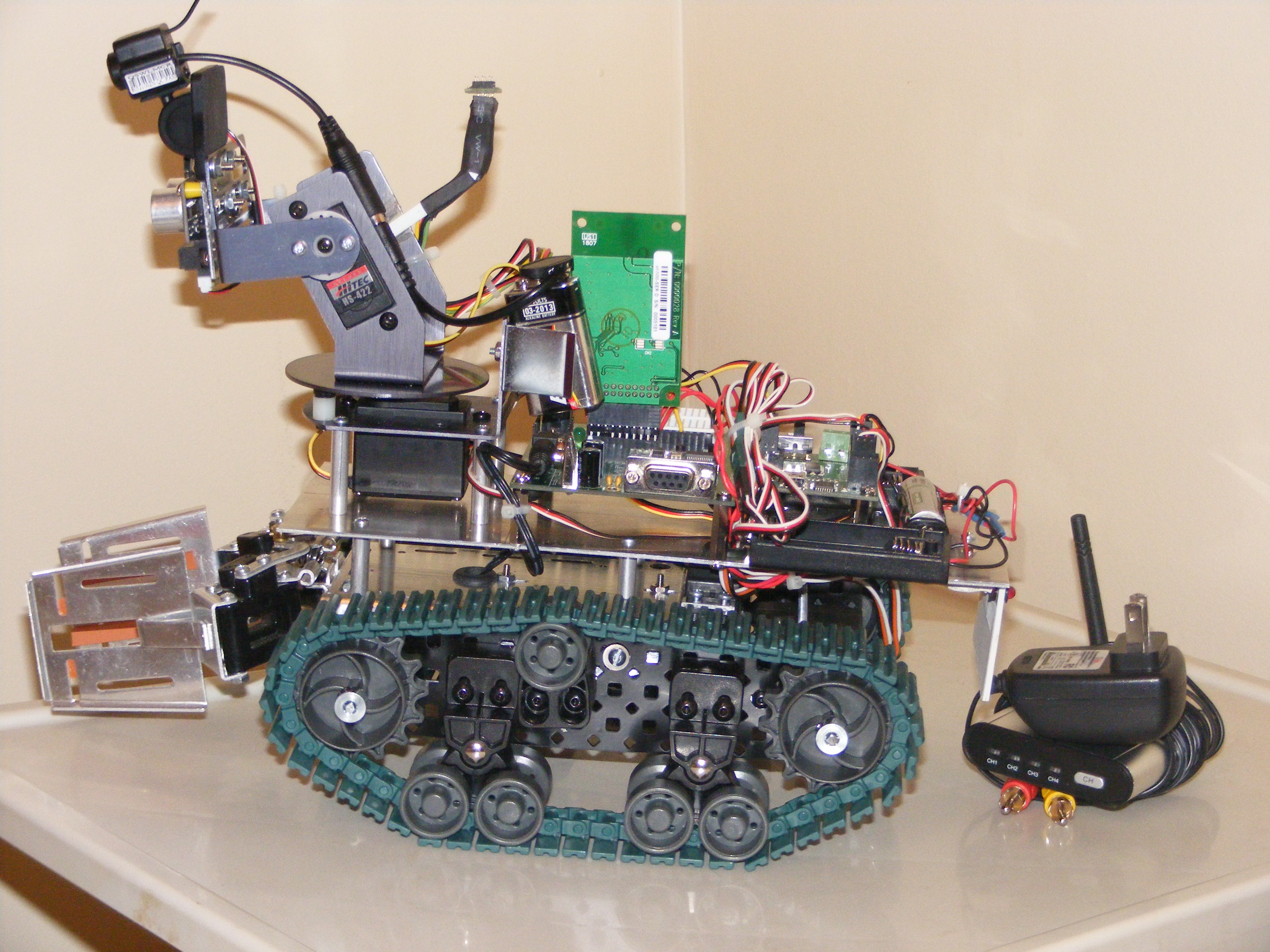
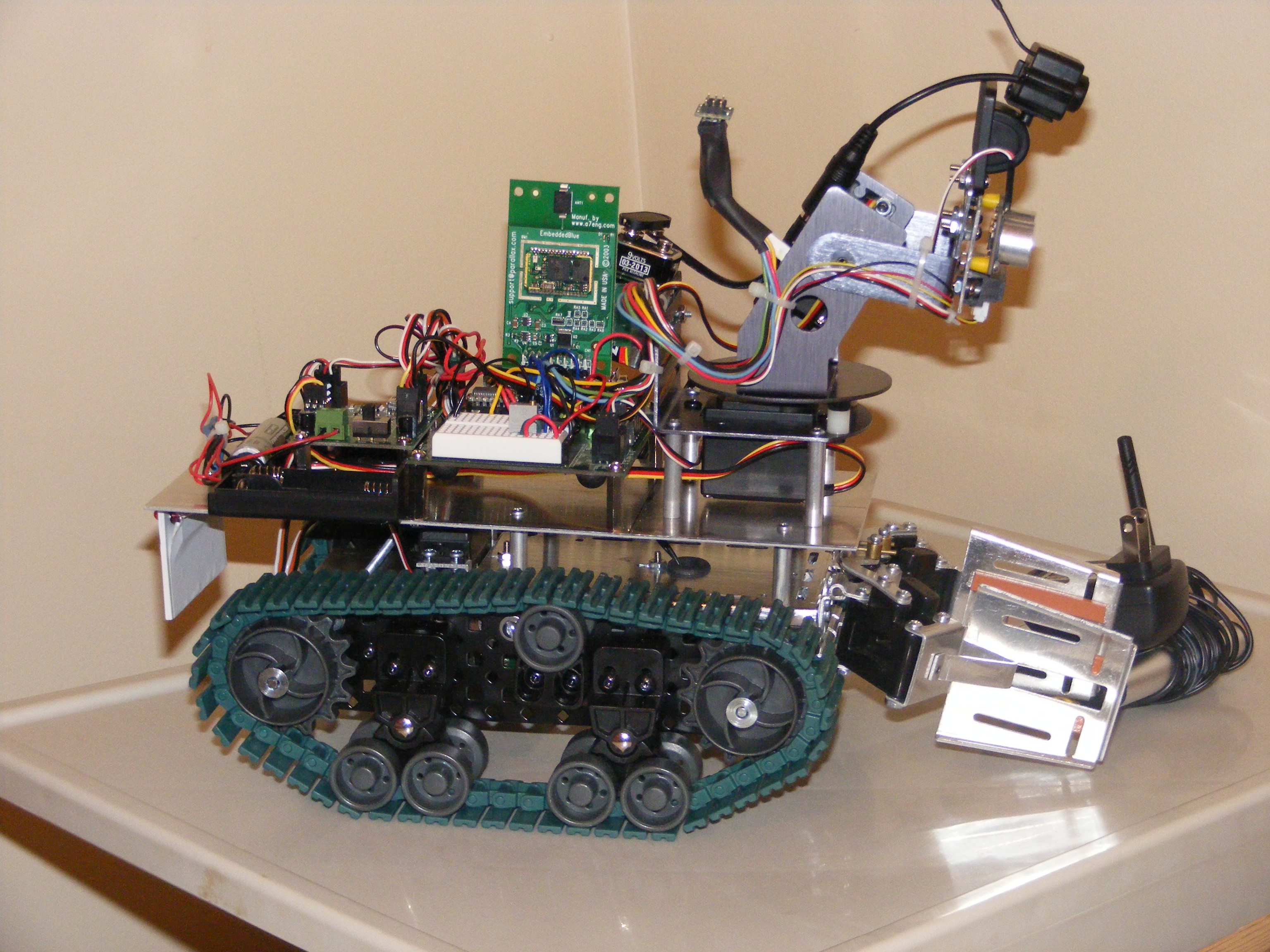
The unit is based on a BOE-BOT chassis with the following added components:
- Parallax Gripper for the BOE-BOT
- Tracks and motors from VEX (the only thing I could find that works with the carpeting in my house)
- Crustcrawler S3 pan/tilt sensor head
- Hitachi® HM55B Compass Module
- Parallax Ping ultrasonic range finder
- Sharp GP2D12 IR sensor, read with a ADC0831
- Parallax Servo Controller
- eb500 Embeded Blue bluetooth transciver
- Q-See Ultra-mini Color Wireless Camera
·
The unit has two programs completed.
·
The first program posted combines the IR Remote operation with the roaming with Ping. The robot will wait for about 20 seconds to see if the infrared remote is being used. If it doesn’t see the remote it will start out on its own and wonder around looking for a clear path.
·
The second set of programs allows the robot to be controlled using a game controller attached to a PC. I have a small TV located next to the PC to receive the images from the security camera attached to the pan/tilt sensor.
·
After I showed it to our Superintendant, she suggested we have it make an appearance at the start of school assembly. We’ll have the camera feeding into the projectors on either side of the stage so the students will get a “robots eye view” as it comes on stage to meet the Superintendant.
Post Edited (MSDTech) : 6/28/2008 3:39:52 PM GMT
3072 x 2304 - 1M
3072 x 2304 - 2M

Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Current Projects:
Robot Control Via Skype API - Dev Stage(50% Complete) - Total(25%)
Robot Localization Via Xbee's - Research Stage
IR Tracking with Propeller - Research Stage
The two additional circuit cards are the eb500 bluetooth appmod and the Parallax servo controller. The servo controller allows the BOE to control up to 16 servos. It also eliminates the need to be constanly sending pulses to each servo, as it handles that element of servo operation. All I need to do is send a simple serial message to the controller telling it what I want each servo to do.
I've also attached the front and rear views to give a better idea of how its put together.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
MIKE
Modifications:
1. The biggest change was to build a custom chassis and remove the Boe-Bot chassis (I needed it to be used in the club). This allowed me to move the servo batteries under the chassis, lower the center of gravity.
2. An SX-28 proto board was added to off-load some of the processing from the BS2px that is now its primary processor. The SX is responsible for controlling the tail lights and turn signals, monitoring drive battery voltage and monitoring the two QTI sensors that are used as wheel encoders (see attached photo).
3. Modified the Gripper to have each paddle driven by its own servo. Sparkey can now wave a flag.
4. Mounted the Boe-Bot wiskers on the Gripper paddles as bump sensors.
I've attached the SX/B code, the code for the BS2px and the Visual Basic 6 program that allows me to drive the robot with a game controller. The biggest change in the code is that it now sends the readings from all the sensors back to the VB application and displays them on the "Control Panel".
The latest, but probably not the last, revision is on my previous post.
One thing you need to be aware of is the drive and idler wheels on the Vex tracks have a square center hole. I use the vex motors, as they mate with the square shaft for the wheels. I had to make a set of bearing blocks for the driven wheels to accomodate these square shafts. For the idler wheels, I drilled out the wheel and machined a shaft to match.
You should also be aware that I used two of the Vex track kits. That way I could have more bogie wheels (and had 4 spare drive/idler wheels in case I messed up drilling out the center holes).
Rick
Post Edited (MSDTech) : 7/12/2009 3:53:56 AM GMT
Really great photos and excellent build! I like the idea of starting simple and building up from the basic foundation. You have accomplished this and then some.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
humanoido
TriCore Stamp Supercomputer
Minuscule Stamp Supercomputer
Stamp SEED Supercomputer
Basic Stamp Supercomputer
Three Dimensional Computer
Penguin with 12 Brains
Penguin Tech
StampOne News!
Penguin Robot Society
Excellent project and very impressive robot!!
One demonstrates variations in Boe-Bot turning and the other how to solve a "Stuck in Corner" problem.
And if the students do calibrations on their servos and IR sensors, could they send the values to me? I'll add to my databases. Values sent to me to date are available as data tables and graphs at the same site.
- John