

Xbee + Parallax Propeller + VB.Net
 DiablodeMorte
Posts: 238
DiablodeMorte
Posts: 238
This isn't exactly a "complete" project.. But considering how "complete" my projects get. This is about as close as it gets:
He's what I've rigged up:
Very Simple Schematic:
Propeller Pin 7 - Xbee DOUT
Propeller Pin 7 - Xbee DIN
Propeller VDD - Xbee VCC
Propeller GND - Xbee GND
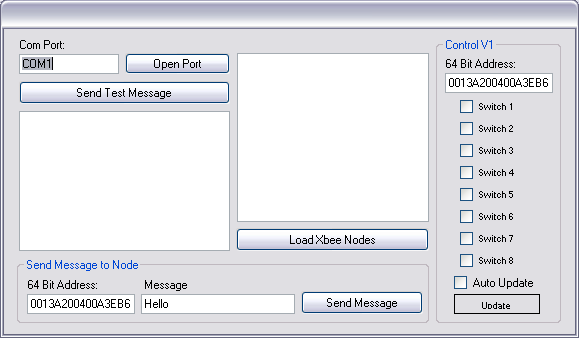
Visual Basic Program:
[noparse][[/noparse]Screen shots Attached]
I originally designed this program to test my ability to send and receive via the COM port. When I finally got it working I thought: "Dang, I wonder if I can actually work w/ the xbees now?"
So, that's exactly what the program does: it communicates and excepts communication from Xbee's. It sends messages, receives messages, identifies packets, and as a unique feature: Allows me to command an propeller on the other end of a xbee to turn on/off each of 8 leds.
Xbee:
The xbees are set up in API mode which is the reason I'm proud of what I've done. In transparent mode I could have done the LED ON/OFF thing in about 1 hour. In API mode I had to figure out how to calculated checksums, send bytes via VB.net, and use the bits of a byte individually to determine which LED's are supposed to be on/off.
Propeller:
The propeller's code is fairly simple(It's attached). It needs to be "slimmed down" a little since it was originally designed to test "Sending" via the Xbee and to decode Xbee API packets. What it does is send a test packet to the "Coordinator," wait for a response packet(ie, a confirmation of reception) and then wait for an control packets. The control packets are simple: 1 byte($64) and then the control byte. The control byte's 8 bits are used to turn the onboard LED's on and off. (if Bit 1 is "true" then Pin 16 is high, if not ping 16 is low, etc)
I don't have any actual pictures now(other than the screenshot) but I'll try to post some later.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Current Projects:
Robot Control Via Skype API - Dev Stage(50% Complete) - Total(25%)
Robot Localization Via Xbee's - Research Stage
IR Tracking with Propeller - Research Stage
He's what I've rigged up:
Very Simple Schematic:
Propeller Pin 7 - Xbee DOUT
Propeller Pin 7 - Xbee DIN
Propeller VDD - Xbee VCC
Propeller GND - Xbee GND
Visual Basic Program:
[noparse][[/noparse]Screen shots Attached]
I originally designed this program to test my ability to send and receive via the COM port. When I finally got it working I thought: "Dang, I wonder if I can actually work w/ the xbees now?"
So, that's exactly what the program does: it communicates and excepts communication from Xbee's. It sends messages, receives messages, identifies packets, and as a unique feature: Allows me to command an propeller on the other end of a xbee to turn on/off each of 8 leds.
Xbee:
The xbees are set up in API mode which is the reason I'm proud of what I've done. In transparent mode I could have done the LED ON/OFF thing in about 1 hour. In API mode I had to figure out how to calculated checksums, send bytes via VB.net, and use the bits of a byte individually to determine which LED's are supposed to be on/off.
Propeller:
The propeller's code is fairly simple(It's attached). It needs to be "slimmed down" a little since it was originally designed to test "Sending" via the Xbee and to decode Xbee API packets. What it does is send a test packet to the "Coordinator," wait for a response packet(ie, a confirmation of reception) and then wait for an control packets. The control packets are simple: 1 byte($64) and then the control byte. The control byte's 8 bits are used to turn the onboard LED's on and off. (if Bit 1 is "true" then Pin 16 is high, if not ping 16 is low, etc)
I don't have any actual pictures now(other than the screenshot) but I'll try to post some later.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Current Projects:
Robot Control Via Skype API - Dev Stage(50% Complete) - Total(25%)
Robot Localization Via Xbee's - Research Stage
IR Tracking with Propeller - Research Stage
579 x 338 - 13K

Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Tech Support
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Current Projects:
Robot Control Via Skype API - Dev Stage(50% Complete) - Total(25%)
Robot Localization Via Xbee's - Research Stage
IR Tracking with Propeller - Research Stage
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Tech Support