

Need some ideas for knee joint actuators

So I have been working on this design for about a week now. I am trying to design a hexapod that has dynamic motion control and can run. Right now the only goal is to make a working model that has linear springs in the legs and an off balance rotating disc to provide rotational energy to the spring system. I am trying to design it so that when the robot steps down and through the stride phase, the kinetic energy from the landing is stored in potential energy in the spring and then helps to push the robot back up through the flight phase before the next legs touch down. In designing this, I have discovered that using a single hip joint actuator is not enough because the legs would hit the ground while reseting during the opposite stride phase. I need to design a knee join to bend back while the legs are in the recovery phase.
What kind of actuators can I use?
requirements-
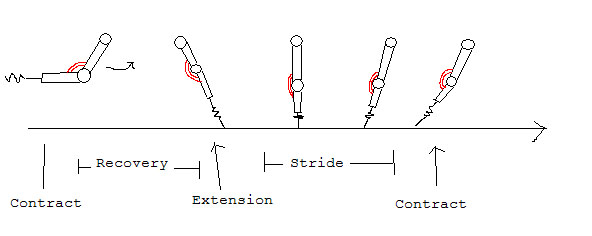
knee joint must stay straight during the stride phase
bend when the leg leaves the ground
straighten again just before it sets down again.
see picture!
I would like to keep this small and lightweight and energy efficient. A few problems I see right now is that I need the actuator to act quickly. and the system needs to be strong enough to support the leg through the stride.
What kind of actuators can I use?
requirements-
knee joint must stay straight during the stride phase
bend when the leg leaves the ground
straighten again just before it sets down again.
see picture!
I would like to keep this small and lightweight and energy efficient. A few problems I see right now is that I need the actuator to act quickly. and the system needs to be strong enough to support the leg through the stride.
592 x 236 - 31K
Comments
meaning· the parts move because the polarity alternates or changes, this is known as a liner particle acceloration.· so If the idea is can you use it"magnitizm" to redistribute weight,the answer is yes·.
ofcorse this isnt the device you need,but with the right info you can build one.
your closer with a tube and a coil pushing and pulling magnetized lugnut's notted on a string it works well·but warned ,when you induce a field it will emit or radiate current too -"the lugnut will shock you". think of it as the secondary in a transformer .
as much as·I would like to say I like the idea I want to also steer you right, the big reasons why these arent used· in many robotics projects is because of the fields effect on other circuits·in proximation,·like poping&kracking in radio or noise in digital circuits isolation is important,let alone its effect on small motors,compass,accelorometer's,relay's misbehave and radiation,·it dose work but isolation is the key.
··
Ted