

New "Toy" - nice robot platform
 Beau Schwabe
Posts: 6,576
Beau Schwabe
Posts: 6,576
Ok, so we have officially reached "geek" status on our street. My wife just recently had ankle surgery (beginning of April) and while looking for alternative modes of transportation we settled on a "Human Transporter" or HT for short. Her work is only about 3 miles from the house, and the streets are relatively flat. We decided on an HT 4-Wheel version rather than a 2-Wheel version only for better stability. One thing they don't tell you with a 2-Wheel, is that since it's basic mode of motion relies on a perpetual state of falling, if the batteries are LOW, then you can fall flat on your face. A 4-Wheel version avoids this problem.
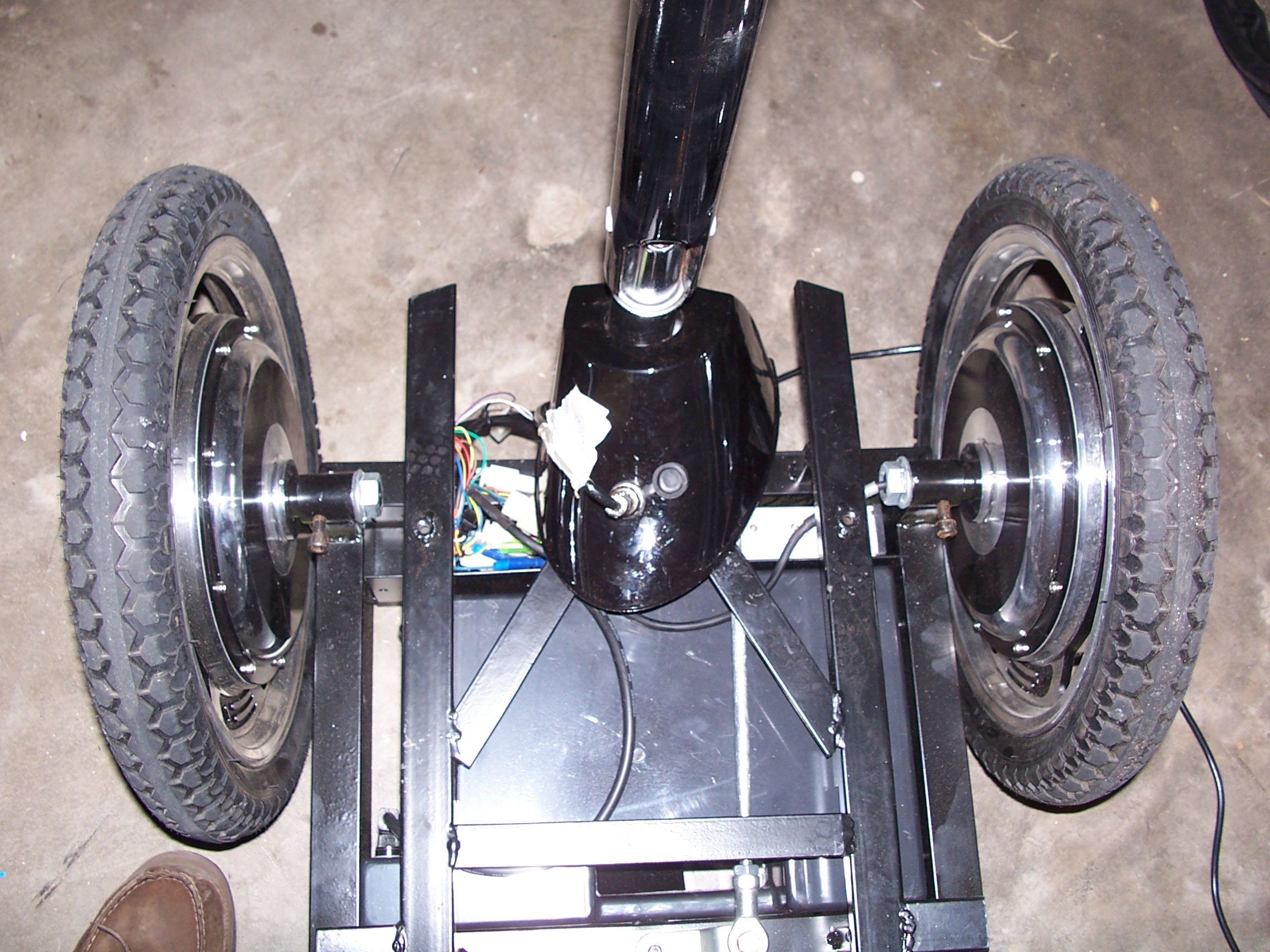
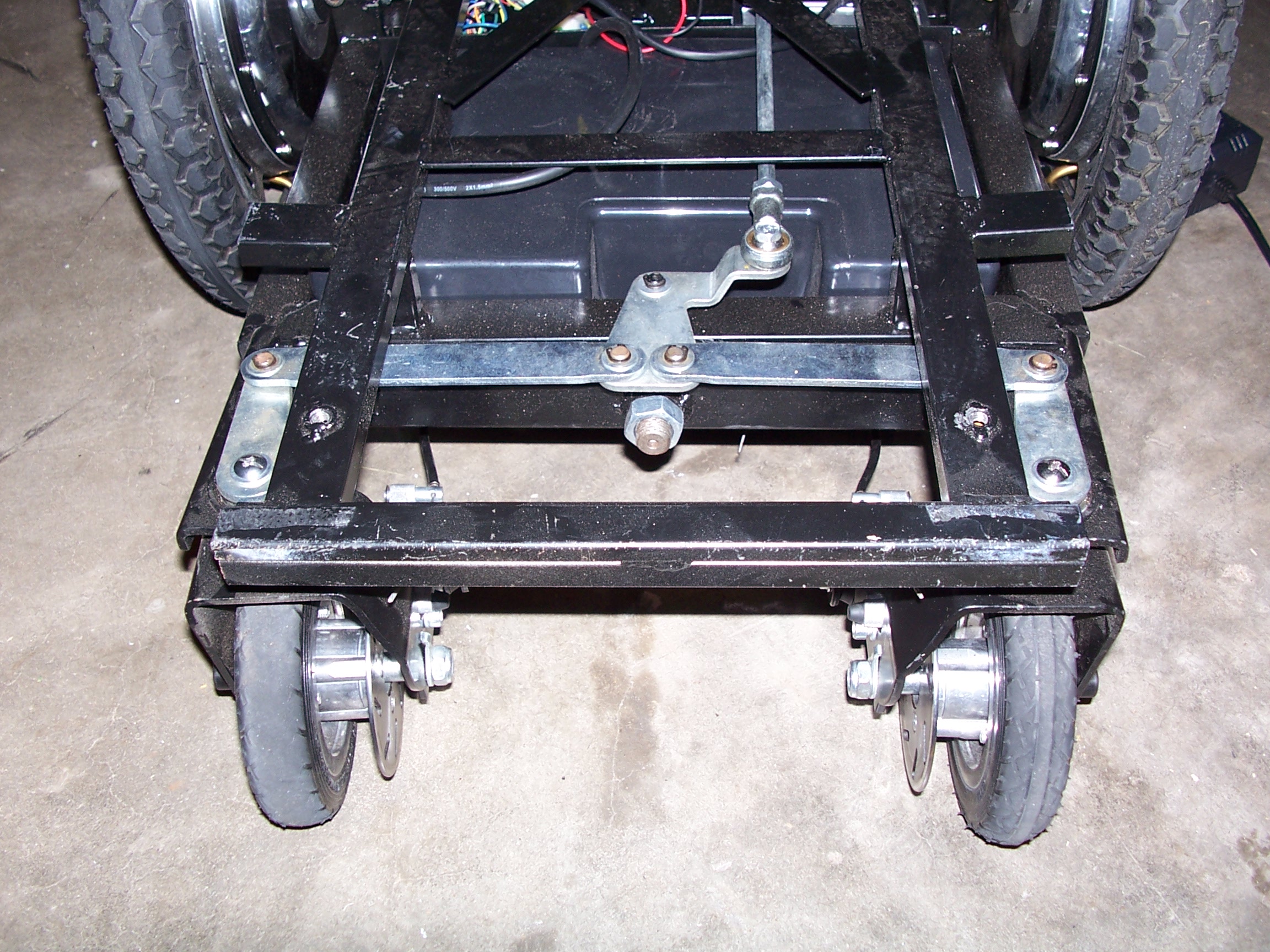
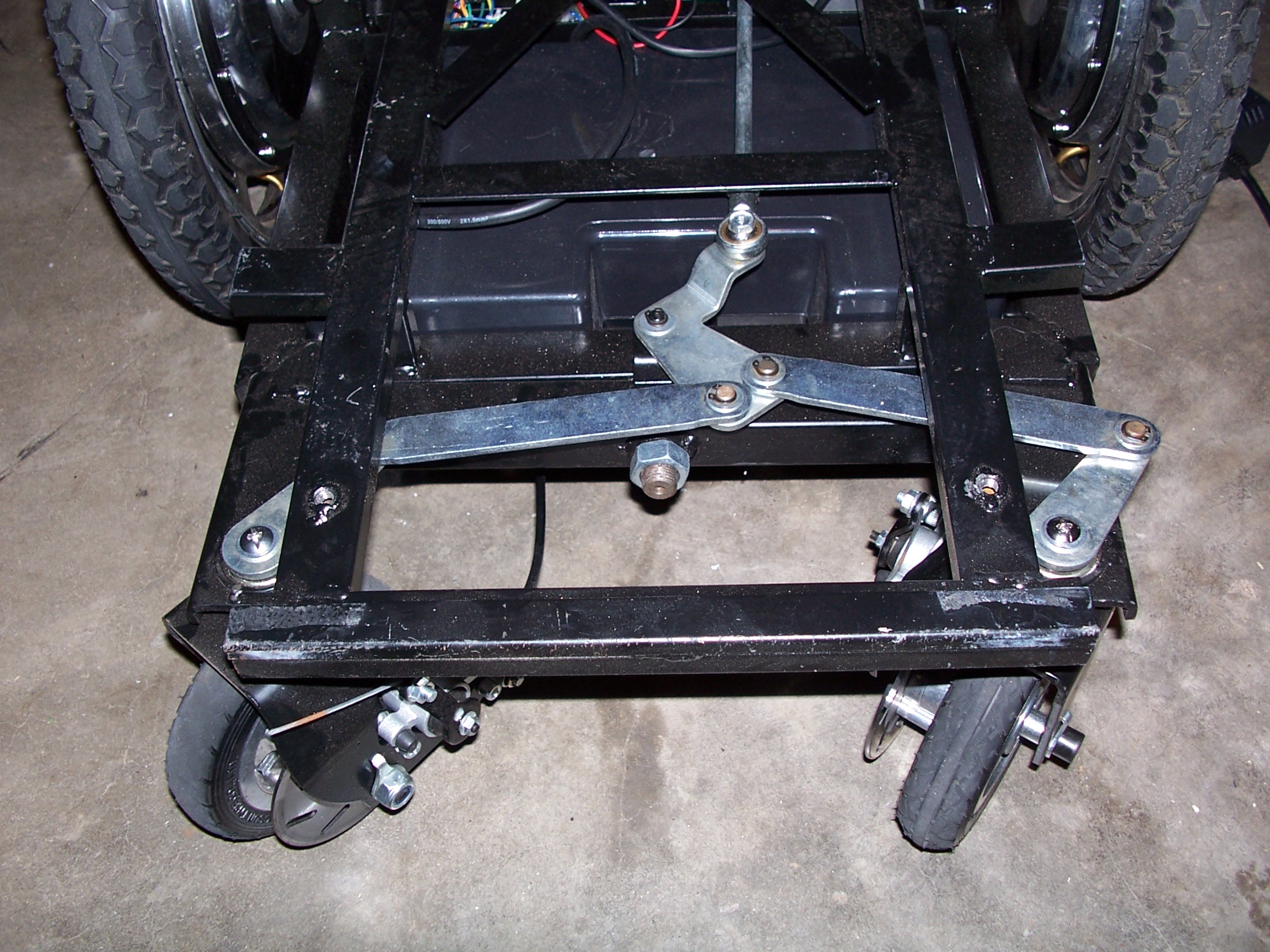
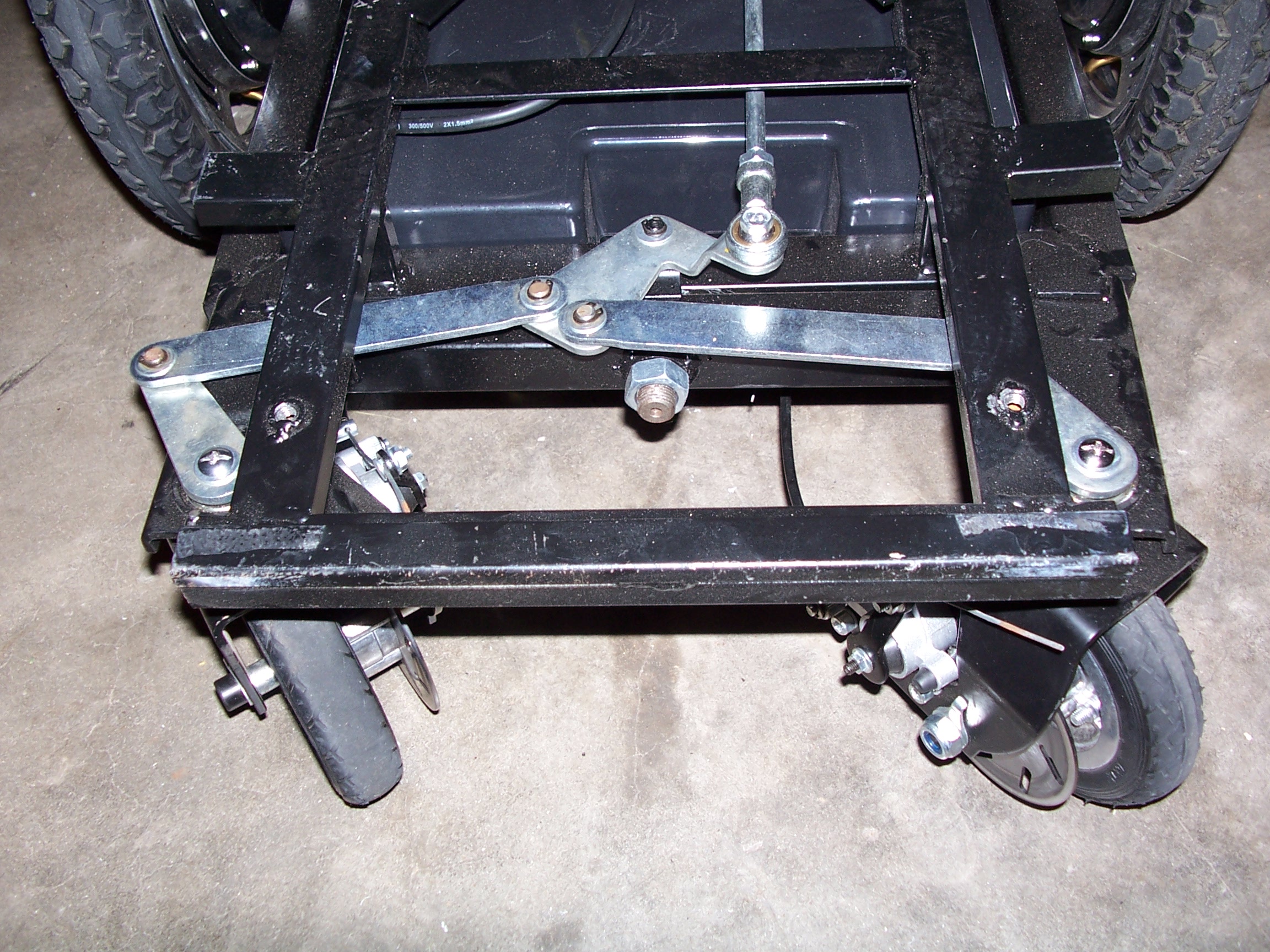
Anyway, I thought that the steering mechanism was interesting enough that I thought I would take pictures, and post them in the forum, perhaps to inspire an idea to any of you out there. I know from my own personal robotics building journey, that the steering mechanism can be tricky to master. I think that this is a good solid sturdy design. The "drive wheels" are basically for all practical purposes very similar to the type of motor you would find in a ceiling fan. The system runs on 36 volts at 10 Amps (360 Watts)
Aside from a slight wheel miss-alignment issue that required a trip to the hardware store (<-see the worn rear wheel on the left in the photos... The problem that caused that has since been corrected), I have been very pleased with the performance of this machine. Even though the weight limit is stated at being 250 pounds, I can appreciate its' ability to move even myself up a hill without much complaining.... ...After an 8 mile test ride, the motor, batteries, and controller were cool.... no perceivable temperature increase.
...After an 8 mile test ride, the motor, batteries, and controller were cool.... no perceivable temperature increase.
Enjoy
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
Post Edited (Beau Schwabe (Parallax)) : 5/30/2008 2:35:02 AM GMT
Anyway, I thought that the steering mechanism was interesting enough that I thought I would take pictures, and post them in the forum, perhaps to inspire an idea to any of you out there. I know from my own personal robotics building journey, that the steering mechanism can be tricky to master. I think that this is a good solid sturdy design. The "drive wheels" are basically for all practical purposes very similar to the type of motor you would find in a ceiling fan. The system runs on 36 volts at 10 Amps (360 Watts)
Aside from a slight wheel miss-alignment issue that required a trip to the hardware store (<-see the worn rear wheel on the left in the photos... The problem that caused that has since been corrected), I have been very pleased with the performance of this machine. Even though the weight limit is stated at being 250 pounds, I can appreciate its' ability to move even myself up a hill without much complaining....
...After an 8 mile test ride, the motor, batteries, and controller were cool.... no perceivable temperature increase.Enjoy
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
Post Edited (Beau Schwabe (Parallax)) : 5/30/2008 2:35:02 AM GMT

1728 x 2304 - 978K
2304 x 1728 - 878K
2304 x 1728 - 1M
2304 x 1728 - 1015K
2304 x 1728 - 1M
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Searider
·
I'll get back to you with what the·turning radius actually is.· I don't know the inside details of the controller,·but it seems to handle very well.
Something interesting I noticed going up a hill... it strains for a moment, but when it detects that there is a load, it almost feels like it goes into another gear... a higher torque mode, making the brief period of straining a thing of the past.· Now, when you level out and get to the top of the hill you can feel it kick the torque back down... the first couple of times it does that, it sort of throws you off guard only because there is a little bit of delay involved.
·
Perhaps some video or something is in order....
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
Post Edited (Beau Schwabe (Parallax)) : 5/30/2008 3:38:17 AM GMT
The turning radius from the outer most drive wheel to a center pivot point is about 33 inches. This was measured by placing a piece of tape on the outer most wheel. Exactly 4.25 wheel revolutions were counted to complete a full circle. The tires are 15.5 inches diameter.... 15.5 X Pi = 48.7 inches .... 48.7 inches X 4.25 revolutions = 207 inches ... 207 inches / Pi = 66 inches .... 66 inch diameter divided by 2 = 33 inch radius.
Each drive wheel is spaced 20.5 inches apart, thus making the inner drive wheel turning radius about 12.5 inches. The ratio between the different wheel speeds ends up being about 2.64 to 1 in an extreme turn.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Searider
We have had Segways since 2003. I have personally investigated what was probably one of the first Segway related accidents. It happened right about the time that a picture of our president was shown falling off one - he had not turned it on. With the original version of the Segway software it was possible to cause the machine to shut down while riding it. although to make that happen you first would have to ignore the warning alarm, the red flashing light and the "stick shake" - then you would have to put the machine under a large, sudden load which the batteries could not deliver. In 2003 the first update was made available to correct this. I am unaware of any recent instances of a Segway shutting down while being ridden.
Rich H (not affiliated with Segway LLC in any way)