

Autonomous Toy Boat, revisited

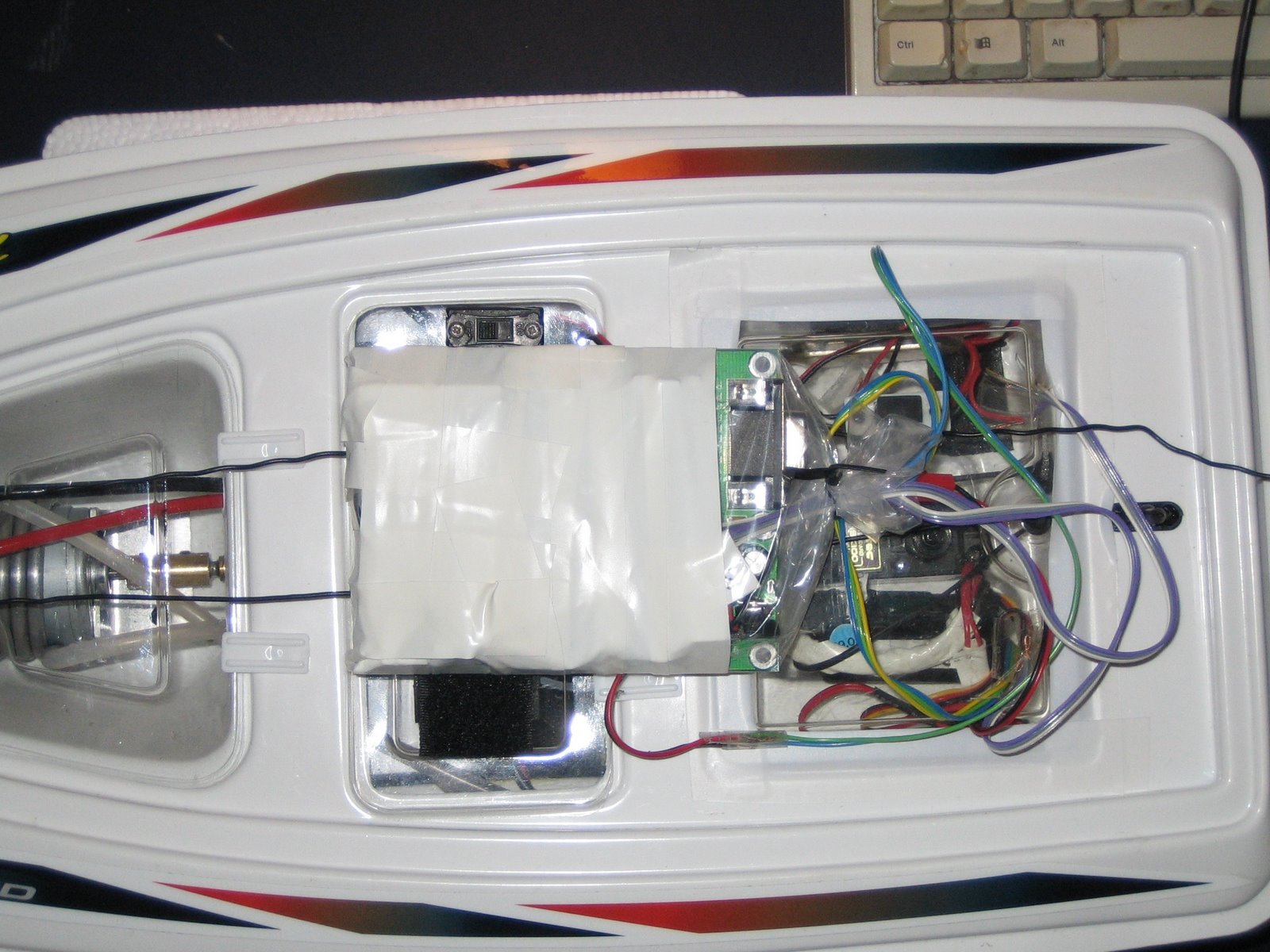
Over a couple of beers, me and a friend came up with the idea to try to build a solar powered autonomous toy boat that were capable to sail from Europe to the US. Later, we found jhoyoza posts in this forum and thought it was a good start to build a similar boat, learn as much as we could, and then take it to the next step. We started out with a small wood boat and have now moved on to a faster one, adding features in a steady pace. Our first buy was a Parallax Basic Stamp 2e and the board of education. We have then added a Pololu micro servo controller, a Garmin eTrex Vista GPS and a pile of commonly used R/C gadgets.
The boat is recently finished, and we're just about ready to start making the first longer trips. So far, we've always had the boat within range for the manual override switch. One more feature that we're working on is an onboard 3G mobile phone. The plan is for the boat to be able to respond to sms with it's current location, as well as answering incoming video calls.
For more information visit our project blog (its in Swedish, but a picture says a thousand words) http://korsaatlanten.blogspot.com/

The plan is to evaluate the project this summer and then upgrade to a bigger hull as we begin work on the solar power. More information on the project will be posted soon.
The boat is recently finished, and we're just about ready to start making the first longer trips. So far, we've always had the boat within range for the manual override switch. One more feature that we're working on is an onboard 3G mobile phone. The plan is for the boat to be able to respond to sms with it's current location, as well as answering incoming video calls.
For more information visit our project blog (its in Swedish, but a picture says a thousand words) http://korsaatlanten.blogspot.com/
The plan is to evaluate the project this summer and then upgrade to a bigger hull as we begin work on the solar power. More information on the project will be posted soon.

2272 x 1704 - 2M
1600 x 1200 - 287K
Comments
The Basic Stamp 2e is a good microcontroller for this project, but two main problems had to be solved for it to work. First, sending a stream of commands to rudder and speedcontoller while at the same time listening to the receiver for a possible manual override command was a bit too much multitasking. This was solved by using the Pololu micro servo controller, enabling the BS2 to command a rudder position and speed which is then kept until further notice. Secondly, it took us a while to figure out why the BS2 gave funny numbers when calculating the heading from the GPS. This was solved by adding a fixed value to the variables before the calculations so that the BS2 never had to use negative numbers.
Other problem that we've encountered is that small toy boats are generally not built to navigate icy Swedish waters. This was solved by finding a good supplier of spare propeller blades.
The main problem we're faced with now is weight and power. Using standard R/C-batteries is a convenient and fairly cost effective way to increase range. However, the boat is now twice as heavy as it used to be in its standard configuration. It would be possible to build a power cell using lighter lithium-based batteries but then the cost would soar. The way to go is solar power, but that will probably require a third flatter hull. Here's a nice similar project from New Zeeland:
Youtube link
The plan of the project is to have a solar powered boat by next summer that is capable of traveling from Stockholm to Gotland (a Swedish island, about 400 km round trip). The year after, we've hoped to have learned enough to start building a boat capable of crossing the Atlantic. The goal is to make it go from Sweden to the US, take a photo, and then return. The trip will probably take a summer just in travel time, that is, if it survives the waves, fishnets, tankers, whales, etc., etc. If it were in fact to make it to the US, there's always the possibility of it being blown up by the coast guard. But considering all other possible ways to end up at the bottom of the Atlentic, it's a minor one.
The hull for an Atlantic trip will probably be quite different. We're thinking in the lines of a semi-submerged boat-ish thing that would survive being overturned by storms and lying dormant for sunless weeks.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
The pessimist is never disappointed.
a) maybe able to save space and weight, by going with a gps module. Maybe power also, due to no lcd/display.
b) and maybe useless, due to power/weight/drag/? to use the ocean as a battery.
But, as you pointed out, the GPS module is far superior in weight and power consumption. The Garmin GPS will be connected to run on the boats batteries, reducing weight slightly. For the moment we have three separate battery systems, one rack of heavy-duty for the engine, one lighter airplane battery for the electronics and the GPS R6 batteries.
We love to get ideas for alternative ways to generate power for longer trips. It's a bit scary sending it on longer trips with just one solar panel. It would be preferable to have separate power sources so that if the solar panel fails, the boat can still send its location via sms and power the electronics with i.e. wind power.
Id have the boat go into low power mode if a big enough storm was detected no sense fighting a fight you can't win. and use J. A. Streich's idea, have it switch into charge mode as the big waves are tossing about.
and don't forget the ever important, return shipping address on the hull. just in case it runs a muck!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"A complex design is the sign of an inferior designer." - Jamie Hyneman, Myth Buster
DGSwaner
Thanks for the good idea.
Another thing, concerning the currents; best way to the US from Sweden, north or south of England? Against the Gulf stream or with the north equatorial current? Perhaps better performance from the solar panel(s) closer to the equator is a factor? Not much of a rush though, we don't have to look into that for at least a year or two..
A Peltier device is a thermoelectric device that transfers heat from one side to another. They can even develope frost on one
side and the other side be hot enough to melt plastic... they are often used in camping fridges, CPU coolers and the like.
They are known to be very inefficient for this task....
But they have another use. When there is a large temp difference between the two sides, they generate a current of their
own!
Basically you'd need a large temp difference between the sides... and as far as I can figure, the ocean is most likely the
largest freaking heat sink in the world.
Its just a thought. I'm no expert on Peltier devices or even electronics in general. Just thought I'd toss in my two cents.
The Peltier device idea for power sounds neat. Ultimately the power system may be a combination of multiple methods so it is robust. I suspect that maybe the on-board electronics may get optimized to reduce their current draws.
What is the latest with your experiments Tantan?
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
We’ve run into a bit of a snag with the project lately. It turns out that the bow mounted engine generated a strong enough magnetic field to make the internal magnetic compass go nutty. It’s kind of like the cartoons, when in order to make a wagon go you put a treat on a fishing rod and dangle it in front of the horse, well our boat was constantly chasing its own magnetic field. We’ve tried to use the compass bearing that the GPS can calculate from the satellites, but not only does it not work while the boat is still, it also seems fairly inexact. The problem was solved by adding a rather unaesthetic superstructure on top of the boat so that the compass is farther away from the engine.
Another problem that took some time was that the speed controller that only was supposed to regulate the flow of power from the main battery to the engine diverted some of that power and sent it back into the servo controller chip (BEC-function). This royally screwed up the flow of electricity and nearly fried the entire chip. Luckily, we had a spare speed controller that suited our project better.
We’ve also spent some time optimizing the timing of the autopilot-loop so that the every burst of data that is broadcasted from the GPS really is picked up and used to correct the heading.
Due to heavy rain we couldn’t do the planned sea-trials yesterday and are now aiming for the first half next week, maybe preluded by good-luck sacrifice to Poseidon.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
Anyway: are you going to have an American contact? Your boat may be damaged in the journey, so it would be useful to have somebody look over it and make sure it can get back safely. Neat project.