

Xbee with BoeBot
 DiablodeMorte
Posts: 238
DiablodeMorte
Posts: 238
I just finished a project of mine. When I say "finished" I actually should say "I got it to a stage in which I could conceivably present it without it failing miserably"
PLATFORM:
The platform is a stock Serial BoeBot that I won at a robotics camp I attended this summer.
MODIFICATION:
The modification is a XBEE Series 2 Zigbee Module by Digi/MaxStream
WHAT'S COOL:
Instead of simply using the Xbee's ASCII(AT Command Mode Firmware) wireless transmission I opted for the API firmware. For those of you that havn't used Xbees: they are small RF radios which follow the Zigbee standard and are usually used in data collection because they autonomously form networks with fellow xbee's and manage packet routing. The AT Command firmware allows the execution of AT commands(Similar to Modem commands) and also allow the transmission of HEX or ASCII packets to all xbee's in the network. The API firmware steps it up a notch by requiring a whole new format of each message. API allows the transmission of a packet to a particular xbee(which can be achieved in AT Command mode buts it's not as fast).
Because I opted for API I had to program the bot to recognize these packets and then handle them. The commands are very very simple(Forward, Backward, Stop, Left, Right) and they are issued via a Visual Basic program to a "coordinator" xbee(kinda like a "master" router). I also used the SERVOPAL by Parallax to control the servo's.
PROBLEMS:
I ran into several problems in this project. The first of which was the actual creation of API packets. As it turns out API packets require checksums and lengths which I had a hard time calculating(I dropped a 0x00 in the 64bit address). My second problem arose when I tried to send information to the xbee via Visual Basic. As it turns out, visual basic's SerialPort control doesn't state that it will send Byte data, it only shows the use of string data. After I figured out that it will send Byte data I was golden. With that solved I ran into another problem. I couldn't get a reliable read of the serial data when I sent data to the BoeBoe very quickly. The Xbee's are not designed to be very fast. They have inherient overhead to ensure that data gets to the target(Kinda like a TCP approach, I need UDP). I'm fairly confident these can be overcome as I have seen atleast one company controlling a robot in real time very quickly but my approach was to actually set a restriction timer in the Visual Basic program that nullified all commands until a alloted time had elapsed.
PICTURES:
Attached
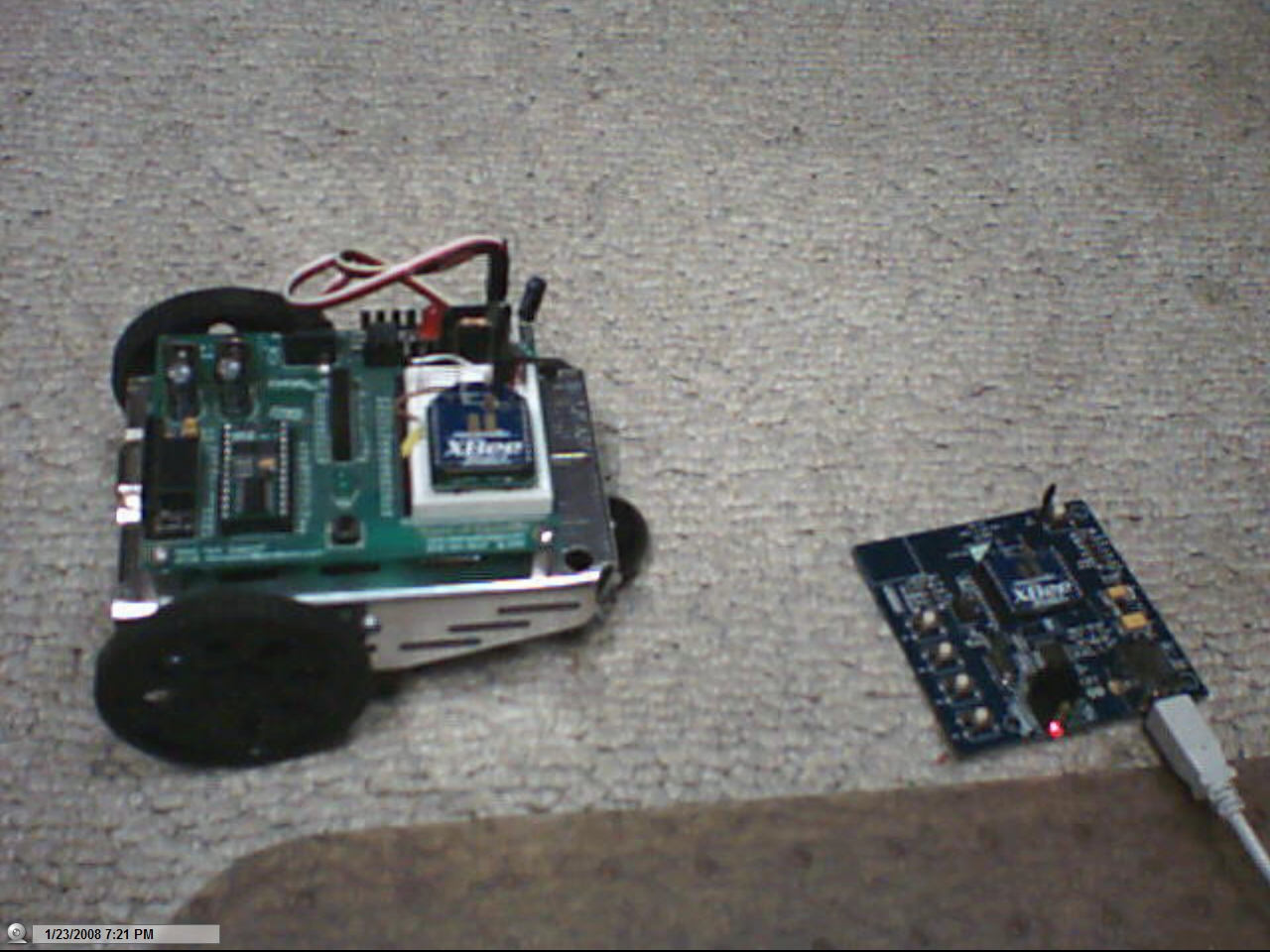
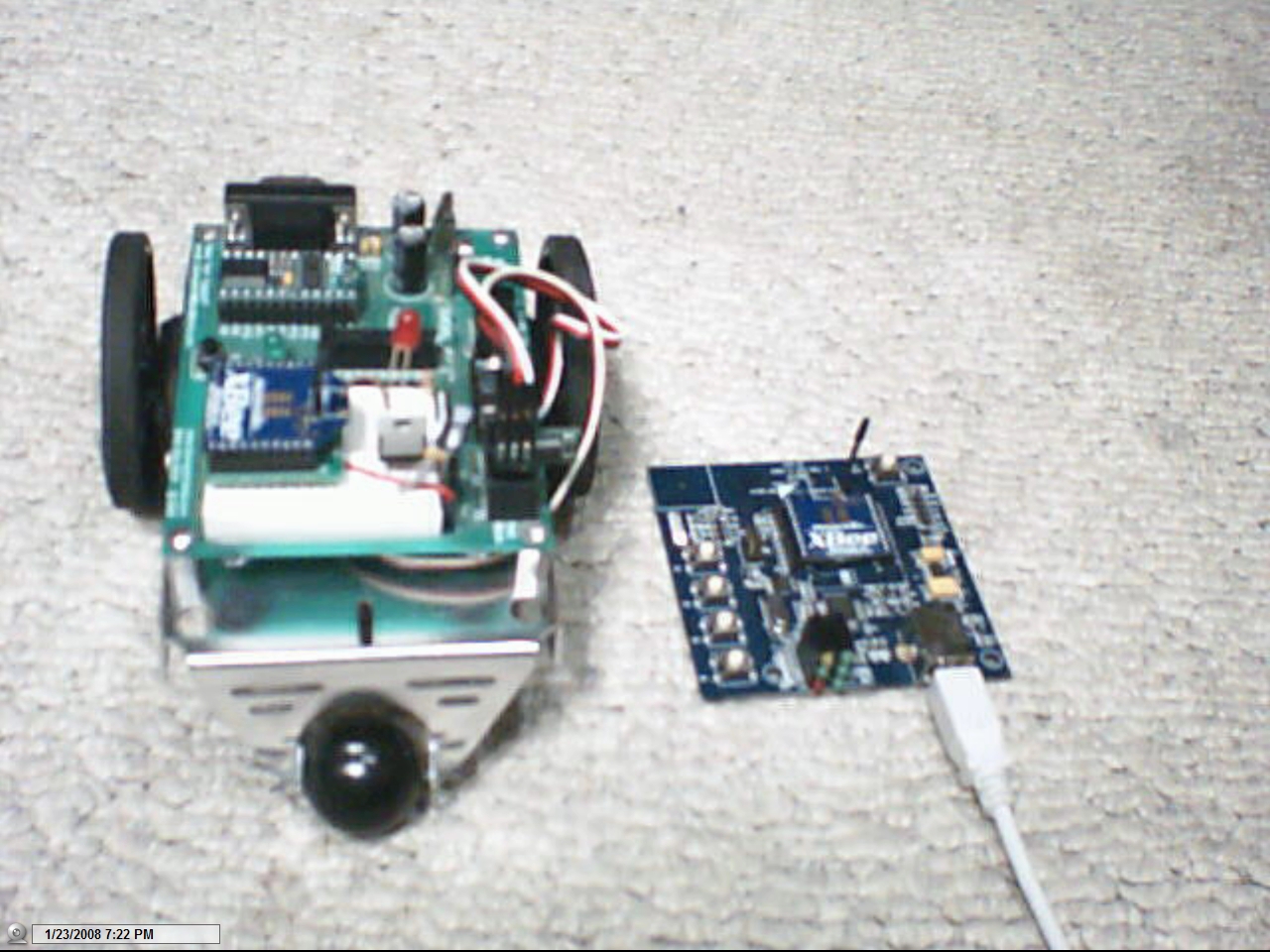
Picture 1 = BoeBot and Xbee w/ Xbee Dev board
Picture 3 = Xbee Dev board
Picture 4 = Another view of BoeBot and Xbee w/ Xbee Dev board
VISUAL BASIC CODE:
Attached
BASIC CODE:
Attached
Regards,
Diablo
Post Edited (DiablodeMorte) : 1/25/2008 12:19:23 AM GMT
PLATFORM:
The platform is a stock Serial BoeBot that I won at a robotics camp I attended this summer.
MODIFICATION:
The modification is a XBEE Series 2 Zigbee Module by Digi/MaxStream
WHAT'S COOL:
Instead of simply using the Xbee's ASCII(AT Command Mode Firmware) wireless transmission I opted for the API firmware. For those of you that havn't used Xbees: they are small RF radios which follow the Zigbee standard and are usually used in data collection because they autonomously form networks with fellow xbee's and manage packet routing. The AT Command firmware allows the execution of AT commands(Similar to Modem commands) and also allow the transmission of HEX or ASCII packets to all xbee's in the network. The API firmware steps it up a notch by requiring a whole new format of each message. API allows the transmission of a packet to a particular xbee(which can be achieved in AT Command mode buts it's not as fast).
Because I opted for API I had to program the bot to recognize these packets and then handle them. The commands are very very simple(Forward, Backward, Stop, Left, Right) and they are issued via a Visual Basic program to a "coordinator" xbee(kinda like a "master" router). I also used the SERVOPAL by Parallax to control the servo's.
PROBLEMS:
I ran into several problems in this project. The first of which was the actual creation of API packets. As it turns out API packets require checksums and lengths which I had a hard time calculating(I dropped a 0x00 in the 64bit address). My second problem arose when I tried to send information to the xbee via Visual Basic. As it turns out, visual basic's SerialPort control doesn't state that it will send Byte data, it only shows the use of string data. After I figured out that it will send Byte data I was golden. With that solved I ran into another problem. I couldn't get a reliable read of the serial data when I sent data to the BoeBoe very quickly. The Xbee's are not designed to be very fast. They have inherient overhead to ensure that data gets to the target(Kinda like a TCP approach, I need UDP). I'm fairly confident these can be overcome as I have seen atleast one company controlling a robot in real time very quickly but my approach was to actually set a restriction timer in the Visual Basic program that nullified all commands until a alloted time had elapsed.
PICTURES:
Attached
Picture 1 = BoeBot and Xbee w/ Xbee Dev board
Picture 3 = Xbee Dev board
Picture 4 = Another view of BoeBot and Xbee w/ Xbee Dev board
VISUAL BASIC CODE:
Attached
BASIC CODE:
Attached
Regards,
Diablo
Post Edited (DiablodeMorte) : 1/25/2008 12:19:23 AM GMT


Comments
Thank you for contributing you knowledge [noparse]:)[/noparse]
Looking forvard to see other your projects!
Janis
What version of microsoft Visual Studio Solution are you using?
I receive (unrecognized version) when I try to open it and cannot.
Is It the Visual Studio 2008 Express Edition All-in-One ?
Rob7
Post Edited (Rob7) : 1/27/2008 5:34:40 PM GMT
Microsoft Visual Studio 2008
Version 9.0.21022.8 RTM
Products Installed:
Microsoft Visual basic 2008 91908-152-0000043-60604
Hope that helps!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Current Projects:
Robot Control Via Skype API - Dev Stage(50% Complete) - Total(25%)
Robot Localization Via Xbee's - Research Stage
IR Tracking with Propeller - Research Stage
Good job!
Can u tell me what RF protocol did u use exactly for controlling the boe bot?
Thanks;
Labhesh.
I'm not sure exactly what you mean by "Protocol." I sent data using the Xbee Zigbee API. I sent 5 data "chunks." The first was the command and the other are reserved for later. Xbee receive packets contain lots of data such as the 64bit address of the sender, the 16bit address of the sender, status and so on. In my code I simply skip all this data and get right to the data I want [noparse]:)[/noparse]
Hope that helps, I can pull out the actual Xbee Hex code for Transmitting and receiving if needed.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Current Projects:
Robot Control Via Skype API - Dev Stage(50% Complete) - Total(25%)
Robot Localization Via Xbee's - Research Stage
IR Tracking with Propeller - Research Stage
Nice work!
I am trying something similar with many BoeBots that have Xbees on them but I have a problem with communication.
I see in your bs2 file that u don't set the address of the Zigbee?
And the only thing is SERIN SI, Baud, [noparse][[/noparse]WAIT($7E),SKIP 13,dat1]
What does this do?
I try simple communication but it sometimes works sometimes not.
Did you have similar problems?
Thanks a lot in advance
Hope that helps
(disclaimer - I'm working with Series 1 XBees. The Series 2 might have some differences)
If you set one module's "MY" to 0, it will only receive data transmitted by modules whose DL is also 0.
If you set one module's DL to 0x0000FFFF, it will be set to broadcast, and its transmissions will be received by all other modules in range, regardless of their MY settings.
I'm have all of my XBee modules set up with their own MY addresses in the non-volatile configuration memory. However, I'm using several of them to receive from a module that has its DL set to 0 (that is, the transmitting module is only sending to modules whose MY is 0). I'm doing that rather than broadcast because the broadcast mode does not do acknowledgement and retries (since it assumes many different receivers). I expect to only receive through one module at a time, and I'm not sure what effect multiple receivers with the same MY setting has on acknowledgement and retries (so far it just simply seems to work fine, but maybe when one of the receiving modules gets out of range problems will appear).
Anyway, rather than setting the receiving modules MY addresses to 0 through the configuration software, I have the processors they're connected to temporarily setting them at powerup. One of them is connected to a BS2PX, and the other to a Prop Protoboard. Both work fine. There's probably a more eloquent way of doing this, but I'm just trying to get things working the way I like them.
From the official site of the Xbee I got a manual with sample codes how to send and receive but with configuring the Xbee's at the start and then send messages between.
so I am using the code:
HIGH TX
DEBUG CLS, "Configuring XBee..."
PAUSE 2000 ' Guard time for command sequence
SEROUT TX,Baud,[noparse][[/noparse]"+++"] ' Enter command mode
PAUSE 2000 ' Guard time for command sequence
SEROUT TX,Baud,[noparse][[/noparse]"ATNI BS2 Test Node",CR, ' Set description
"ATMY ", HEX myAddr,CR, ' Set node address
"ATDL ", HEX DestAddr,CR, ' Set destination node address
"ATD6 1",CR, ' Use RTS for flow control
"ATCN",CR] ' Exit command mode
PAUSE 1000
DEBUG "Configuration Complete!",CR
RETURN
where myAddr and destAddr are the addresses of each vehicle and I want them to send some data between them.
Also I use
PAUSE 20
SEROUT TX,Baud,[noparse][[/noparse]"+++"] ' Enter command mode with minimal guard time
PAUSE 2
SEROUT TX,Baud,[noparse][[/noparse]"ATDL", HEX DestAddr, ",CN",CR] ' Update DL for polling
RETURN
to change the destAddr.
When I do this and then try to send simple data like
SEROUT TX, Baud, [noparse][[/noparse]"H", CR, CR] - at the sender every second or two
SERIN RX, Baud, [noparse][[/noparse]poraka] - at the receiver
sometimes the received data is different, sometimes nothing is received, sometimes something else is wrong..
How can I have a secure communication?
That is what is bothering me
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"When the government is afraid of the people there is liberty, when the people are afraid of the government, there is tryanny"
·Thomas Jefferson