

Bird photography studio & bird feeder

Haven't done a electronic project in over a year and was afraid I had forgotten the little bit
I had learned about circuits and working with Spin.
It mostly came back to me and it helped that the first project back in is a "Frankenstein" of
past projects.
I thought I would post pictures and take guesses on what it does.
If the guesses are better then what it actually does, I will go back and change what it does.
I had learned about circuits and working with Spin.
It mostly came back to me and it helped that the first project back in is a "Frankenstein" of
past projects.
I thought I would post pictures and take guesses on what it does.
If the guesses are better then what it actually does, I will go back and change what it does.
1024 x 683 - 651K
910 x 1024 - 831K
Comments
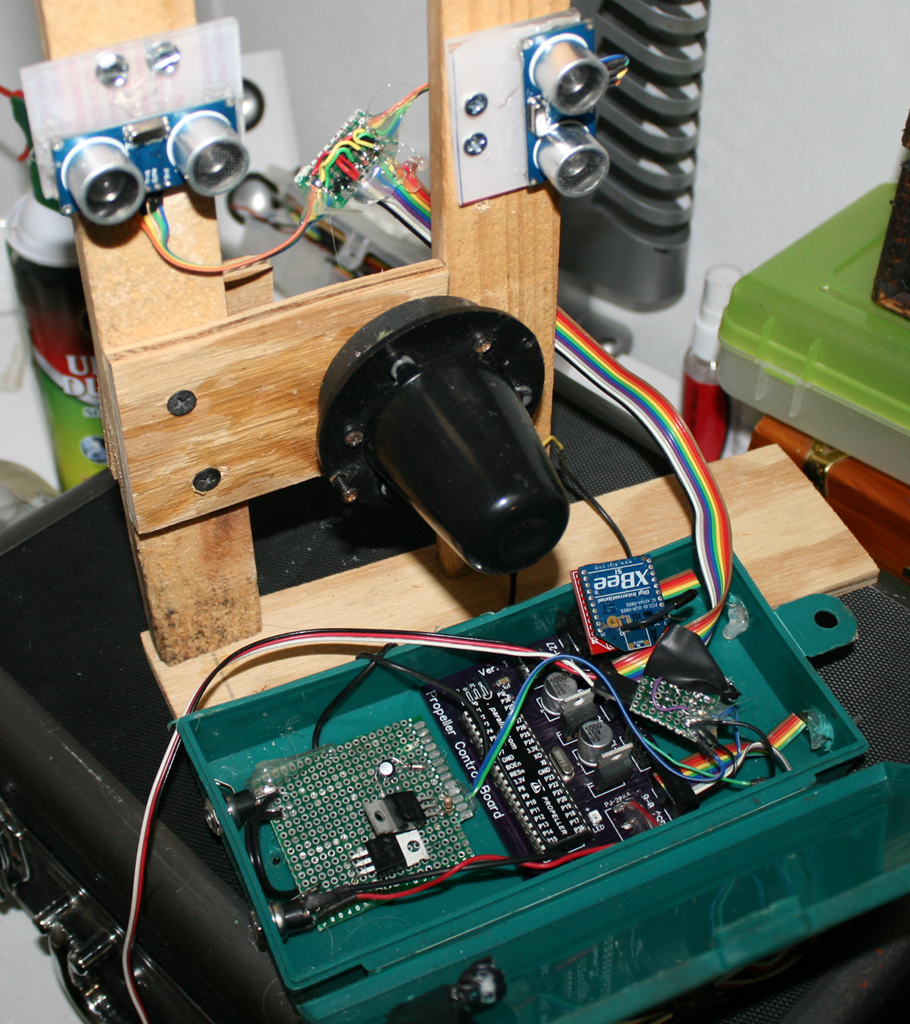
Well, the next picture of the remote unit in it's location pretty much gives it's function away.
The remote unit uses two ping sensors to determine if something has landed on perch or bowl. (distance < 300mm)
It takes a picture and sends which sensor was hit and distance from both sensors back to the base station.
The remote unit is also listening on the xbee to see if any buttons have been pressed on the base station
If the visitor has fur instead of feathers, I can play one of three tunes on the car alarm next to the bird feeder.
If I want to take more pictures, I can control the camera with a button on the base station.
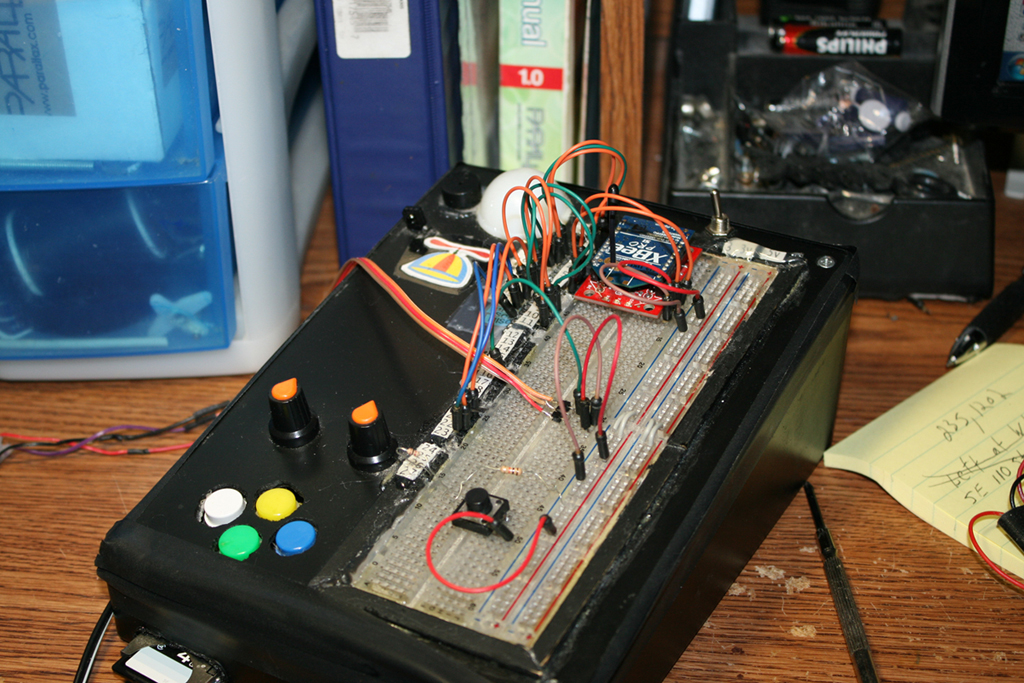
The base station blinks a light and sounds a buzzer when either of the ping sensors are hit. It also records the hits
to a file on the SD card.
So far, everything is working except for visitors.
Next up is adding a video camera to the mix.
Awesome project anyway, it remainds me I should have gone further with a project that scans my garden for incoming deers. They usually do unacceptable damage to my fruit trees.
I wonder what's in the background out of focus, lots of furs from skinned foxes? (img_1444.fpg)
It creates a comma delimited file telling 1) which sensor 2) time 3) total minutes
4) distance from perch sensor 5) distance from bowl sensor
It also records when I press a button on the base station.
The total minutes field proved unnecessary. I was having trouble with
Excel charting using time for x and distance for y. It didn't seem to be spacing
out the time interval, but I was using the wrong chart. Line chart spaces each
data point equally along x axis, but XY chart accounts for gaps in time.
Bowl,08:56 am,536,819,182
Perch,08:56 am,536,294,292
Bowl,08:57 am,537,294,292
Perch,08:57 am,537,262,747
Bowl,08:58 am,538,796,125
Bowl,08:58 am,538,770,129
Bowl,08:59 am,539,762,76
Bowl,09:00 am,540,671,82
Perch,09:01 am,541,292,501
Bowl,09:01 am,541,791,75
Picture,09:04 am,544,0
Bowl,09:06 am,546,847,270
Perch,09:06 am,546,157,175
Zapped,09:06 am,546,0
Bowl,09:07 am,547,157,175
Bowl,09:07 am,547,774,103
Bowl,09:08 am,548,3331,94
Bowl,09:08 am,548,3318,125
Perch,09:13 am,553,119,556
Bowl,09:19 am,559,828,278
Picture,09:21 am,561,0
Bowl was triggered 13 times
Perch was triggered 5 times
In the background are banana plants that hopefully are not completely dead with the few days of below freezing we got.
CON _clkmode = xtal1 + pll16x _xinfreq = 5_000_000 blue = 8 'buttons yellow = 9 white = 10 green = 11 rled = 0 'Tri-color LED bled = 1 gled = 2 alarm = 7 'Buzzer filebutton = 27 'Extra button added to breadboard to close the log file at end of day _dopin = 23 'SD card writer _clkpin = 22 _dipin = 21 _cspin = 20 _cdpin = -1 ' -1 if unused. _wppin = -1 ' -1 if unused. _rtcres1 = -1 ' -1 always. _rtcres2 = -1 ' -1 always. _rtcres3 = -1 ' -1 always. { XBEE 4 and 5 in program below} {GPS receive 16 and transmit 24 in gps float lite} Obj Xbee : "XBee_Object_2" Freq : "Synth" sdcard : "SD-MMC_FATEngine.spin" GPS : "GPS_Float_lite" FS : "FloatString" Var long DataIn,x,y,hour,leftrange,rightrange, minute, m, totalminutes 'to store data received from xbee long ButtonStack[48] 'Button presses are checked in another cog long Frequency 'For the buzzer Pub Main x:=0 'total counts for bowl and perch visits y:=0 dira[rled]~~ dira[bled]~~ outa[rled] := 0 outa[bled] := 0 cognew (Checkbuttons,@ButtonStack) waitcnt(clkfreq + cnt) sdcard.fatEngineStart( _dopin, _clkpin, _dipin, _cspin, _wppin, _cdpin, { } _rtcres1, _rtcres2, _rtcres3) sdcard.mountPartition(0) waitcnt(clkfreq + cnt) sdcard.newFile(string("birdlog.txt")) sdcard.openFile(string("birdlog.txt"), "W") GPS.Init 'GPS is used to get time waitcnt(clkfreq * 2 + cnt) xbee.start(4, 5, 0, 115200) waitcnt(clkfreq * 2 + cnt) outa[rled] := 1 'To alert me everything has loaded. Had problems with SD card not mounting at first. waitcnt(clkfreq + cnt) outa[rled] := 0 repeat CheckRemote waitcnt(clkfreq / 2 + cnt) Pub CheckRemote DataIn := Xbee.Rx if DataIn == "L" 'to confuse me more I reference the two sensors as left and right and perch and bowl outa[rled] := 1 leftrange := Xbee.Rxdec rightrange := Xbee.Rxdec x++ WritePerch sound waitcnt(clkfreq * 5 + cnt) outa[rled]:=0 if DataIn == "R" outa[bled] := 1 leftrange := Xbee.Rxdec rightrange := Xbee.Rxdec y++ WriteBowl sound waitcnt(clkfreq * 5 + cnt) outa[bled]:=0 Pub Checkbuttons dira[gled]~~ outa[gled] := 0 dira[blue]~ 'inputs dira[yellow]~ dira[white]~ dira[green]~ dira[filebutton]~ repeat if ina[filebutton] == 1 'closes the log file Closefile repeat 6 !outa[gled] waitcnt(clkfreq / 9 + cnt) if ina[blue] == 1 'blue button takes a picture with the camera WritePicture xbee.str(string("C")) outa[gled] := 1 waitcnt(clkfreq + cnt) outa[gled] := 0 if ina[yellow] == 1 'yellow plays one of the three tunes of the car alarm WriteShoo xbee.str(string("B")) outa[gled] := 1 waitcnt(clkfreq + cnt) outa[gled] := 0 if ina[white] == 1 'white plays the best of the three tunes of the car alarm WriteShoo xbee.str(string("A")) outa[gled] := 1 waitcnt(clkfreq + cnt) outa[gled] := 0 if ina[green] == 1 'green plays one of the three tunes of the car alarm WriteShoo xbee.str(string("D")) outa[gled] := 1 waitcnt(clkfreq + cnt) outa[gled] := 0 Pub WritePerch sdcard.writeString(string("Perch")) TimeStamp printDecimal(leftrange) sdcard.writeString(string(",")) printDecimal(rightrange) sdcard.writeString(string(13,10)) Pub WriteBowl sdcard.writeString(string("Bowl")) TimeStamp printDecimal(leftrange) sdcard.writeString(string(",")) printDecimal(rightrange) sdcard.writeString(string(13,10)) Pub WriteShoo sdcard.writeString(string("Zapped")) TimeStamp sdcard.writeString(string("0")) sdcard.writeString(string(13,10)) Pub WritePicture sdcard.writeString(string("Picture")) TimeStamp sdcard.writeString(string("0")) sdcard.writeString(string(13,10)) Pub CloseFile sdcard.writeString(string("Bowl was triggered ")) printDecimal(y) sdcard.writeString(string(" times",13,10)) sdcard.writeString(string("Perch was triggered ")) printDecimal(x) sdcard.writeString(string(" times",13,10)) sdcard.unmountPartition PUB sound repeat 2 'repeat 1 Frequency := 1000 repeat until Frequency == 1500 'loop forever to keep cog alive Frequency:=Frequency + 1 Freq.Synth("A",Alarm, Frequency) repeat 150 Frequency := 1500 repeat until Frequency == 2000 'loop forever to keep cog alive Frequency:=Frequency + 100 Freq.Synth("A",Alarm, Frequency) Frequency := 0 Freq.Synth("A",Alarm, Frequency) Pub TimeStamp m := 0 'am or pm 'converts to eastern and 12 hour time totalminutes := 0 sdcard.writeString(string(",")) hour := gps.Long_Hour - 5 minute:=gps.long_minute totalminutes := (hour * 60) + minute if hour < 10 m := 0 sdcard.writeString(string("0")) printDecimal(hour) else if hour > 12 hour := hour - 12 m := 1 else m := 0 printDecimal(hour) sdcard.writeString(string(":")) if minute < 10 sdcard.writeString(string("0")) printDecimal(minute) else printDecimal(minute) sdcard.writeString(string(" ")) if m == 0 sdcard.writeString(string("am,")) else sdcard.writeString(string("pm,")) printDecimal(totalminutes) sdcard.writeString(string(",")) PRI printDecimal(integer) | temp[3] ' Writes a decimal string. if(integer < 0) ' Print sign. sdcard.writeByte("-") byte[@temp][10] := 0 repeat result from 9 to 0 ' Convert number. byte[@temp][result] := ((||(integer // 10)) + "0") integer /= 10 result := @temp ' Skip past leading zeros. repeat while((byte[result] == "0") and (byte[result + 1])) result += 1 sdcard.writeString(result~) ' Print number.CON _clkmode = xtal1 + pll16x _xinfreq = 5_000_000 leftEchoPin = 14 'Ping sensors are 4-pin EBAY cheapos. leftTriggerPin = 15 rightEchoPin = 16 rightTriggerPin = 17 Alarm = 0 '12v car alarm interfaced with a transister Camera = 1 'remote port of canon camera. uses optocouplers to interface VAR long leftrange, leftrangeOld,rightrange,rightrangeold 'for ping sensors long ButtonStack[48] 'checks for base station button presses in separate cog long DataIn 'xbee receive long Frequency 'for alarm OBJ Ultra : "UltrasoundSR04_120612a" 'ping sensors Xbee : "XBee_Object_2" Freq : "Synth" 'for car alarm PUB Start dira[camera]~~ 'output outa[camera] := 0 xbee.start(21, 22, 0, 115200) waitcnt(clkfreq * 4 + cnt) cognew (Checkbuttons,@ButtonStack) leftrange := -1 ' set to impossible range to make sure first new range is displayed rightrange := -1 repeat leftrange := Ultra.Millimeters(leftEchoPin, leftTriggerPin) ' Get Range In Millimeters rightrange := Ultra.Millimeters(rightEchoPin, rightTriggerPin) ' Get Range In Millimeters if leftrange < 300 'if range is less then 300mm something has entered the feeder waitcnt(clkfreq * 2 + cnt) 'give creature 2 seconds to settle before clicking picture TakePicture xbee.str(string("L")) 'alert base station of the intrusion xbee.dec(leftrange) xbee.str(string(13)) xbee.dec(rightrange) xbee.str(string(13)) waitcnt(clkfreq * 20 + cnt) 'wait 20 seconds before checking again to reduce the number of pictures of same bird if rightrange < 300 waitcnt(clkfreq * 2 + cnt) TakePicture xbee.str(string("R")) xbee.dec(leftrange) xbee.str(string(13)) xbee.dec(rightrange) xbee.str(string(13)) waitcnt(clkfreq * 20 + cnt) waitcnt(clkfreq / 10 + cnt) ' Pause 1/10 Second Pub TakePicture outa[camera] := 1 waitcnt(clkfreq / 3 + cnt) outa[camera] := 0 Pub Checkbuttons dira[camera]~~ 'output repeat DataIn := Xbee.Rx If DataIn == "A" SoundThird If DataIn == "B" SoundSecond If DataIn == "C" TakePicture If DataIn == "D" SoundForth PUB SoundFirst repeat 10 Frequency := 2000 repeat until Frequency == 50000 Frequency:=Frequency + 1000 Freq.Synth("A",Alarm, Frequency) Frequency := 0 Freq.Synth("A",Alarm, Frequency) PUB SoundSecond repeat 2 Frequency := 1000 repeat until Frequency == 6000 Frequency:=Frequency + 10 Freq.Synth("A",Alarm, Frequency) Frequency := 0 Freq.Synth("A",Alarm, Frequency) PUB SoundThird repeat 2 'repeat 1 Frequency := 1000 repeat until Frequency == 1500 Frequency:=Frequency + 1 Freq.Synth("A",Alarm, Frequency) repeat 150 Frequency := 1500 repeat until Frequency == 2000 Frequency:=Frequency + 100 Freq.Synth("A",Alarm, Frequency) Frequency := 0 Freq.Synth("A",Alarm, Frequency) PUB SoundForth repeat 100 Frequency := 1500 repeat until Frequency == 2000 Frequency:=Frequency + 100 Freq.Synth("A",Alarm, Frequency) Frequency := 0 Freq.Synth("A",Alarm, Frequency)It might pay to add some type of motion like a servo operated gloved hand.
The motion helps with deer.
Also, deer do not like George Thorogood music.
Not sure about squirrel's.
..
The birds do not seem to be affected by the deturrents I've built.
too close on the rig both for focusing and scaring the birds when the shutter went off.
I am down to one ping sensor as I forgot to add a flyback diode to a motor I was adding to scare away squirrels.
Luckily the ping sensor bite the bullet instead of the xbee.
I still haven't added a new squirrel deterrent.
I'm not sure if you are using an exposure setting of auto, programmed, shutter priority or aperture priority. Photographically, I'd suggest you exchange some shutter speed and ISO (film speed
Greater depth of field will make it easier to have the front end and the back end of your bird in focus. You can see now i man of the pictures where you depth of field is a matter of inches. Higher ISO numbers will make the image noisier (grainier), slower shutter speeds will introduce blur from the birds motion (they twitch quickly), faster shutter speeds let you freeze action better. These are all things you can play with depending on the light for the day and the subject.
I don't know if you are pre-focusing or auto-focusing for these shots. If you are using auto-focus, you may want to try manual focus and focus on the mount midpoint or maybe the mount midpoint minus 1/2 a birds length
It's a great project and should prove to be lots of fun as your visitors get used to everything!
odd cloud at the wrong time would mess up a picture. It has aperture mode but even on my Rebel T3i, these
"assist modes" are horrible at getting white balance for some reason.
Once I get a time of day that gets the most traffic (right now traffic is fairly random) I will probably try manual
mode again.
Not using auto-focus. The lens rotating even freaks them out. Kinda wish I had a good mirror-less camera so it would
be noise free.
Have been busy with my own project for a couple of years and have not been checking what others have been doing. I now know what my next project will be. Methinks a mini gas cannon using a butane canister and pizeo igniter would do wonders keeping unwanted critters away. With all that expensive equipment near my feeders I will have to give up using my air rifle BB gun.
You video reminds me of my favorite part of the movie Up.
Where's Ragtop these days? He sure made a lot of cool projects. I hope all is well with him.
Squirrels are prey animals and have a strong startle reflex. So what really makes them run away is sudden movement and noise. The car alarm test video above only has noise, which is why the squirrel sits there and thinks about if he should leave or not.
You want to have sudden unexpected movement, and the squirrel will soon learn that the thing that moves when he gets close is to be avoided. Get a small DC motor with some sort of wheel that spins, with a pinwheel or something with flaps on it. Make sure it starts up fast! A typical servo is probably too slow.
I've used an RC car sitting out by the bird feeder, which I can see out the window of my home office. It sits there, and then when a squirrel comes up, I pick up the controller and have the car charge the squirrel. The squirrel will RUN. And they quickly learn to recognize the thing that is "guarding its territory" and if they see it, they won't even come close.
However, it seems that the local hawks and other predators cause a lot of turnover in the squirrel population, so there is frequently a new one that has to learn what to stay away from.
We've also used a Scarecrow animal deterrent, which is basically a sprinkler with a motion sensor on it. It works ok for deer, but they eventually learned to stand just outside of its range and calmly munch the apples off the tree while it lightly sprays them. The squirrels NEVER got used to it and would freak out every time it would go off.
https://www.contech-inc.com/products/animal-repellents/scarecrow-motion-activated-animal-deterrent