

ManBot - An experimental platform for autonomous navigation and telepresence

A friend of mine came up with the name. She'd heard about my project for months, and she had the impression I was building some sort of tinker toy. When she finally saw it she said "Wow, that's a real man's robot... a manbot!", and the name stuck. To me it's a Mobile Autonomous Navigation bot. Built on the LynxMotion platform and a Propeller processor, it's my experimental platform for navigation and telepresence. These pictures are from version 0.9.



This is very much a work in progress for me, and I doubt I'll ever flag it "Completed". Next step is building a new circuit board, with dual Propellers, an array of sensors, Xbee link for command and telemetry, data logging and a nice OLED display. I used DipTrace to design the new logic and control boards, all SMT. The new PCBs are already in the mail on their way to me, and I plan to build it over the next three weeks. I'll post more then.
I welcome your questions and comments!
This is very much a work in progress for me, and I doubt I'll ever flag it "Completed". Next step is building a new circuit board, with dual Propellers, an array of sensors, Xbee link for command and telemetry, data logging and a nice OLED display. I used DipTrace to design the new logic and control boards, all SMT. The new PCBs are already in the mail on their way to me, and I plan to build it over the next three weeks. I'll post more then.
I welcome your questions and comments!
Comments
http://www.ebay.com/itm/Chrome-Truck-Nuts-/261032017159?pt=Apparel_Merchandise&hash=item3cc6b87d07&vxp=mtr
Only in America would people bid on a USED pair of those.
* Dual Propeller processors
* L3G4200D gyroscope
* HM55B compass
* 2125 accelerometer
* RTC
* GPS
* MicroMega floating point processor
* 4 x 20 OLED display
* Parallax servo controller
* Sabertooth drive motor controller
* PINGs
* Pan/Tilt camera mount
* Xbee Pro
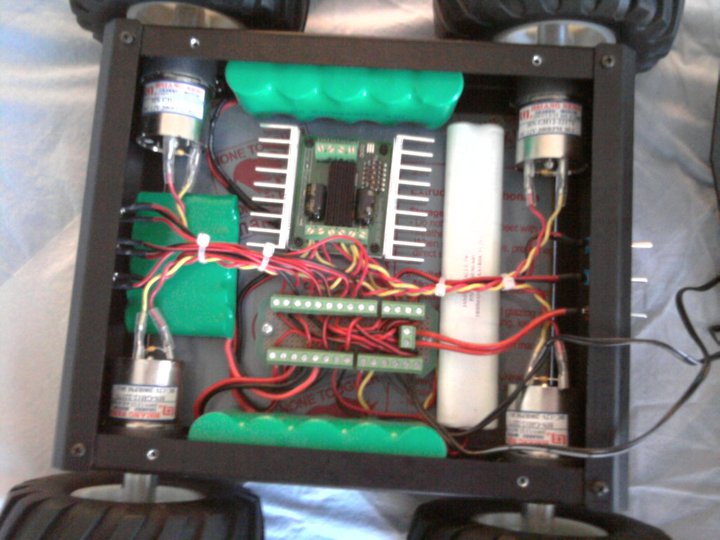
This was my first project with surface mount devices, and I'm actually surprised how easily assembly went. There's a logic card tucked safely away, and a display/control panel exposed on the top of the bot.
I still have a lot of programming to do. So far I've written a protocol for the processors to exchange messages with each other, and a dispatcher that directs the messages to the right place. For example, processor A has the OLED display attached and processor B wants to display something. The "Display" object is the same for A & B so I don't have to consider which processor I'm running on. I just call Display.ShowString, it builds a small message and passes it to dispatcher, which in turn knows that the OLED display is on the other processor and passes it along for handling.
Here are some pics...