

My Propeller based robot - Cartographer

Hello everyone,
It's been a while since I've posted here, but I'm back to show off a robotics project I recently completed using the Propeller.
It's name is Cartographer, and It's a robotic room mapping system I built for my senior project in Electrical Engineering. I designed it from the ground up using free software and the Parallax Propeller microcontroller. It uses XBee for communication with the computer software which is written in Processing. It uses an ultrasonic rangefinder on the front for collision avoidance, and two Sharp infrared distance sensors on either side for collecting map data and more collision avoidance. Both motors have quadrature encoders on the shaft (before the gearbox) for dead reckoning.
I have a WordPress page up for it here with a bunch of extra pictures and information.
Here's a picture of the completed robot (I touched it up a bit for my report)

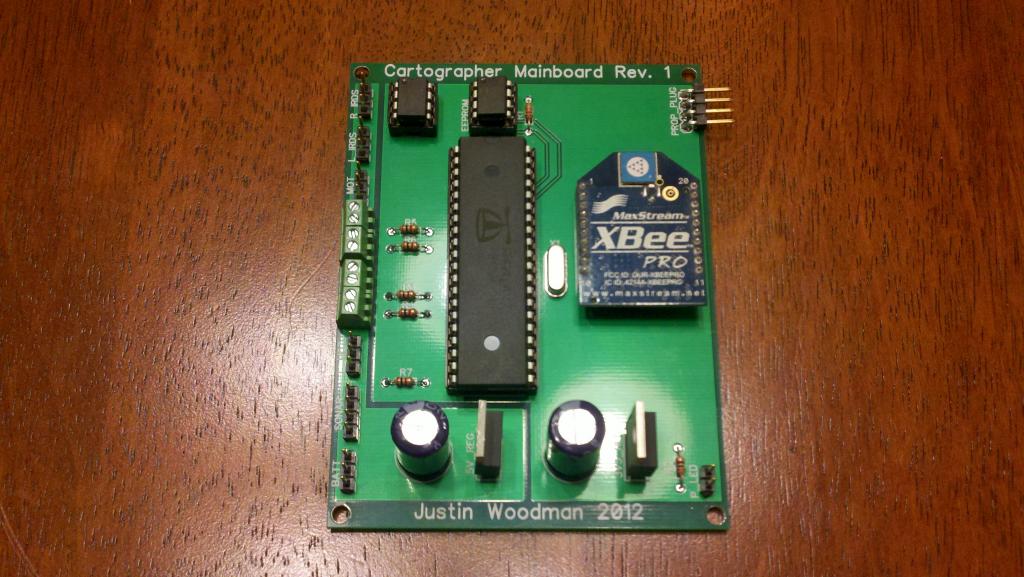
And a picture of the populated circuit board complete with the Propeller
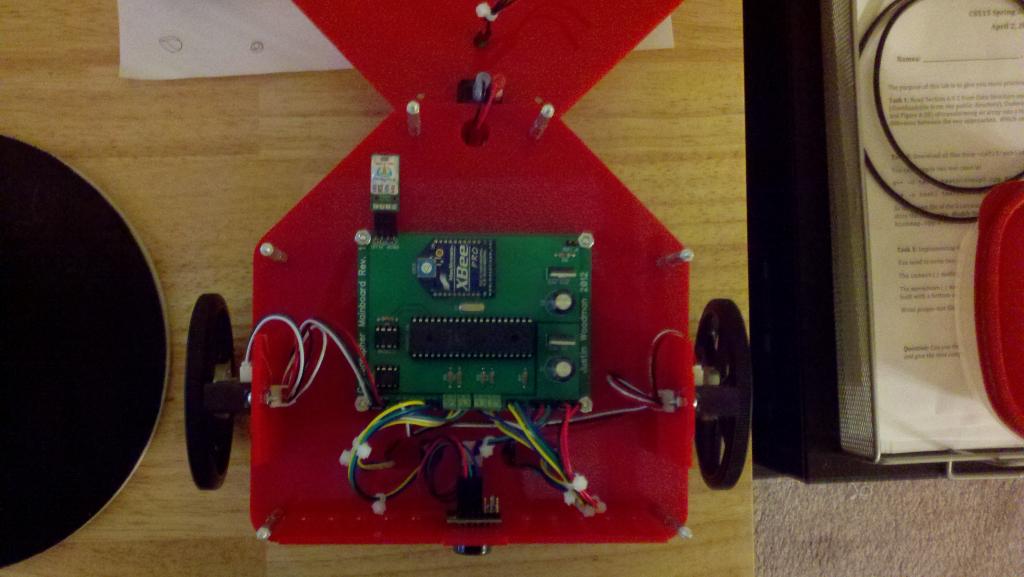
And finally, a picture of the robot with it's top panel removed showing the PCB and all connections
Again, there are a lot of pictures and tons of info at it's page. But I am perfectly happy to answer any questions anyone has!
Thanks for taking a look,
Justin W.
It's been a while since I've posted here, but I'm back to show off a robotics project I recently completed using the Propeller.
It's name is Cartographer, and It's a robotic room mapping system I built for my senior project in Electrical Engineering. I designed it from the ground up using free software and the Parallax Propeller microcontroller. It uses XBee for communication with the computer software which is written in Processing. It uses an ultrasonic rangefinder on the front for collision avoidance, and two Sharp infrared distance sensors on either side for collecting map data and more collision avoidance. Both motors have quadrature encoders on the shaft (before the gearbox) for dead reckoning.
I have a WordPress page up for it here with a bunch of extra pictures and information.
Here's a picture of the completed robot (I touched it up a bit for my report)
And a picture of the populated circuit board complete with the Propeller
And finally, a picture of the robot with it's top panel removed showing the PCB and all connections
Again, there are a lot of pictures and tons of info at it's page. But I am perfectly happy to answer any questions anyone has!
Thanks for taking a look,
Justin W.
Comments
Would it be possible to take the data and then create a CAD model of the room?
To answer your question - sort of. The software lets you export the map as a .CSV file so that you can import it into excel or MATLAB or something, and the units are all in centimeters so it's usable data. However the robot only generates 2D data. I have posted some pictures below as examples of what kind of data you can get.
If you wanted some sort of 3d component, a sensor could be added pointing upward to give the room height.
Awesome job on the robot! It is very cool to see a project built from the ground up that has a real world use! Keep up the excellent work, and outstanding robot design and applications!