

Rotary encoder emulation
 PFloyd36069
Posts: 135
PFloyd36069
Posts: 135
Hello All,
It has been a while since I have posted here. I am currently working on a project where I am trying to emulate a rotary encoder. There is a small dc motor that bidirectionally drives the mechanism that contains the encoder. The motor control uses a duty cycle to control the speed and direction of the motor. What I am trying to do is eliminate the whole mechanism and replace it with a propeller that fools the controller into thinking the mechanism is still present. My original plan was to watch the signal to the motor and increment a counter whenever the signal was high in the forward direction and decrement the counter whenever the signal was high in the reverse direction. The watch the counter and output the signals for the encoder whenever the counter reached the proper positions. Do you all think this is the best way to do this? I have attached a screenshot of one full rotation of the encoder, you can see when the signal starts to repeat. The normal idle state for the encoder is all three channels high. I have also attached the code I have tested and works for one part of the function but when the motor runs in reverse, that is when I start having problems.
Thanks,
Bryan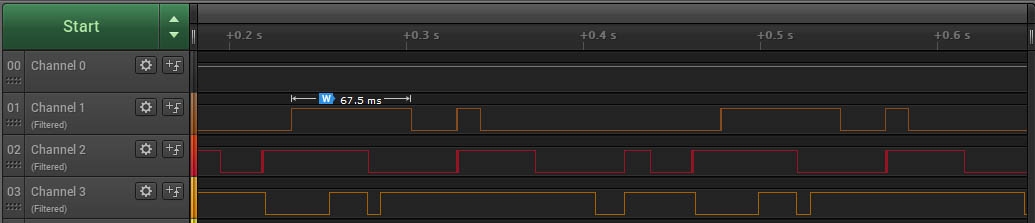
_CLKMODE = XTAL1 + PLL16X
_XINFREQ = 5_000_000
var
long comm_stack[1000]
long timer
OBJ
ser : "fullduplexserial"
PUB Main
timer:=0
cognew(@counter_plus, @timer)
cognew(@counter_minus, @timer)
cognew(@io, @timer)
cognew(comms, @comm_stack)
pub comms | i
ser.start(31, 30, 0, 1000000)
repeat
ser.dec(timer)
ser.tx(13)
waitcnt(clkfreq/2000 +cnt)
DAT
org 0
counter_plus mov t2, par
mov dira, #0
:loop waitpeq pin_a_mask, pin_a_mask
rdlong t1, t2
cmp t1, #0 wz
if_always add t1, #1
wrlong t1, t2
jmp #:loop
pin_a_mask long 1
t1 res 1
t2 res 1
'zero long 0
DAT
org 0
counter_minus mov t4, par
mov dira, #0
:loop waitpeq pin_b_mask, pin_b_mask
rdlong t3, t4
cmp t3, #0 wz
if_always sub t3, #1
wrlong t3, t4
jmp #:loop
pin_b_mask long 1 << 1
t3 res 1
t4 res 1
DAT
org 0
io mov t5, par
mov dira,io_mask
:loop rdlong t6, t5
cmps time3, t6 wc
if_c mov outa, io_3
if_c jmp #:loop
if_nc cmps time2, t6 wc
if_c mov outa, io_2
if_c jmp #:loop
if_nc cmps time1, t6 wc
if_c mov outa, io_1
if_c jmp #:loop
if_nc mov outa, io_0
jmp #:loop
io_mask long %11111111_00000000_00000000
io_0 long %00000000_00000000_00000000
io_1 long %00000001_00000000_00000000
io_2 long %00000011_00000000_00000000
io_3 long %00000111_00000000_00000000
time1 long 15000
time2 long 50000
time3 long 86000
t5 res 1
t6 res 1
t7 res 1