It certainly can't hurt if you're getting jittery values from the joystick. Depending upon which smoothing algo you use, though, you could experience a lag between the joystick movement and the servo actuation.
I'm using two 3 axis joysticks to control my robot arm
In my experience joysticks don't match each other. Even the same joystick may have one axis that is less linear than the other. Every one I've used had to be individually tweaked.
To smooth the return values from an ADC chip, I do two main things: I lower the resolution by shifting bits left. 7-bit to 5-bit resolution works well for me. In Spin I use the 'case' command which allows me to adjust the range of 'acceptable' input values for the return value I want.
In a few cases there might be noise in the circuit but most times I don't care.
Joysticks that use optical encoders will avoid most if not all of the problems that plague potentiometer based units. Of course they are currently a bit more expensive than potentiometer based ones,
Joysticks that use optical encoders will avoid most if not all of the problems that plague potentiometer based units. Of course they are currently a bit more expensive than potentiometer based ones,
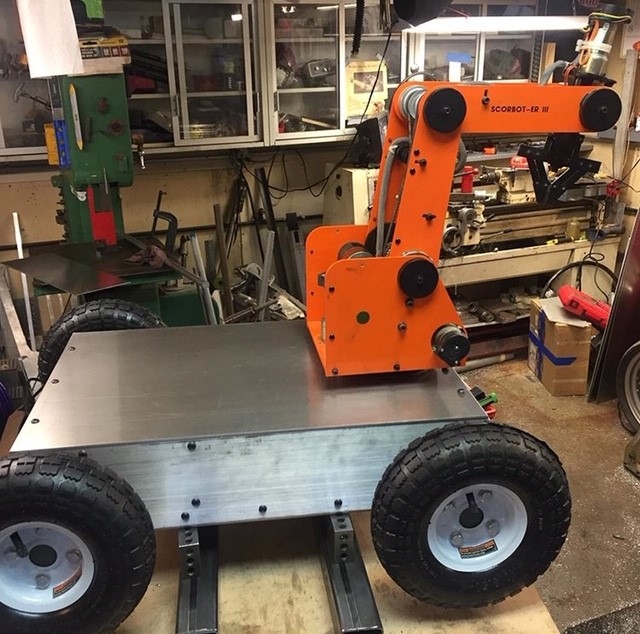
Wow. I've never heard of a joystick that uses optical encoders. I know the topic is about analog joysticks but absolute optical encoders would be excellent. For my project I used geared DC motors with pots on the pivot points. I made a potentiometer based controller (prototype) that mirrors the position of the robotic arm.
Great idea. I'm always learning something new.



Comments
-Phil
In my experience joysticks don't match each other. Even the same joystick may have one axis that is less linear than the other. Every one I've used had to be individually tweaked.
To smooth the return values from an ADC chip, I do two main things: I lower the resolution by shifting bits left. 7-bit to 5-bit resolution works well for me. In Spin I use the 'case' command which allows me to adjust the range of 'acceptable' input values for the return value I want.
In a few cases there might be noise in the circuit but most times I don't care.
Great idea. I'm always learning something new.
https://www.electronicproducts.com/Optoelectronics/Image_Sensors_and_Optical_Detectors/Optical_encoder_with_integrated_joystick_and_pushbutton.aspx
http://www.ctielectronics.com/pdf/820150-L-Series-1-and-2-Axis-Industrial-Joysticks-Reliability-Data.pdf
https://www.digikey.com/en/product-highlight/g/grayhill/series-60c