

Current output smoothing ideas?
 T Chap
Posts: 4,198
T Chap
Posts: 4,198
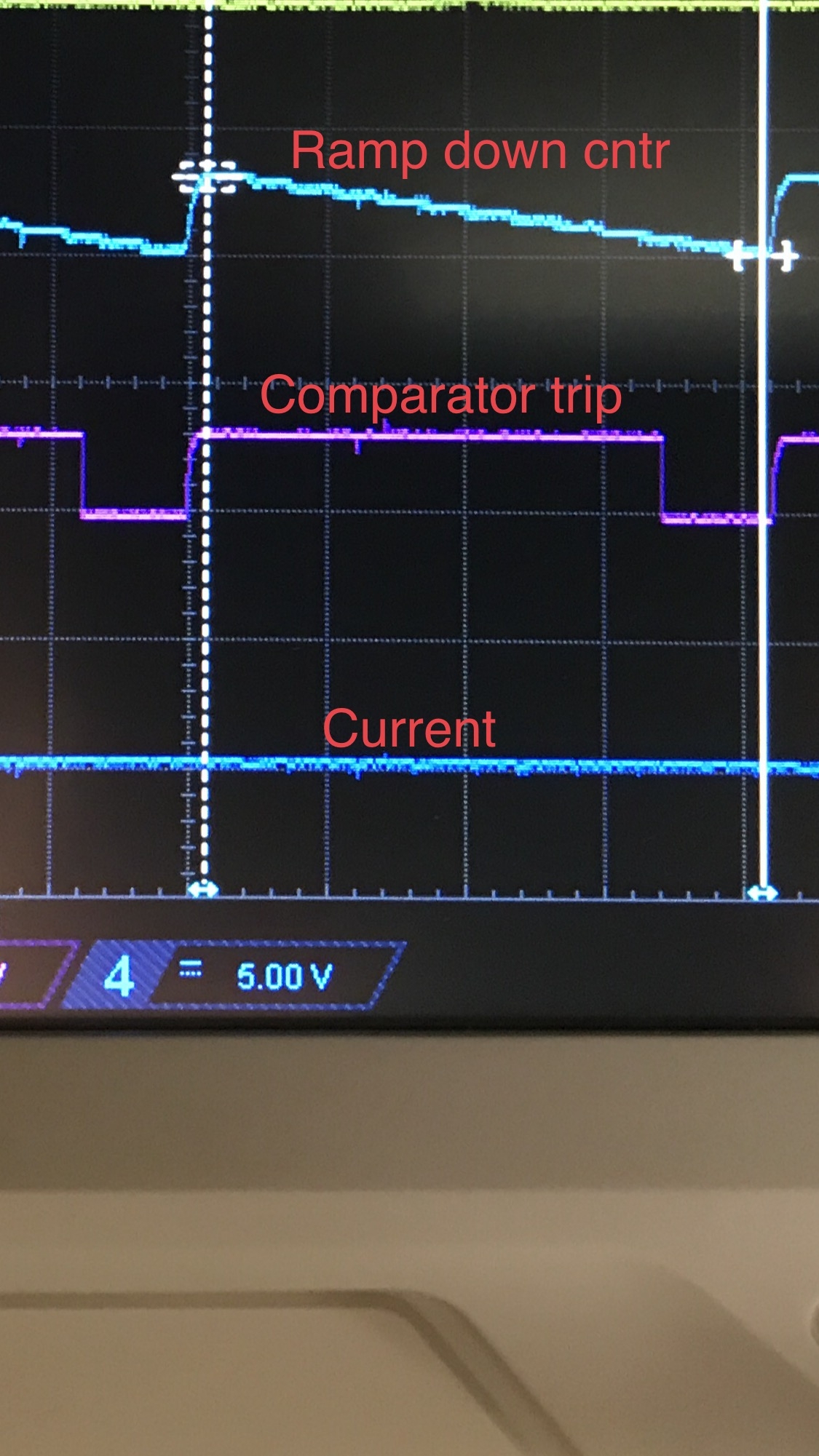
In the photo the top line is a counter ramping FRQA from 3.3 down to 0 in 512 steps feeding a comparator. Second line is the comparator output design the Prop. Third line is a BLDC motor driver current amp output. The output is scaled to around .8V running the motor at 1/2 speed under no load. This gives headroom for max load. The output is rather noisy and I’d like to first see how to make that a lot smoother. I have a 1uf on the output of the sense amp connected on the motor driver shunt and also a 4.7uf on the low pass filter pin on the AD628 sense amp. Still I’d like to see a smoother signal. Ideas? I got in a 12 bit ADC today ADS1015 I2C as there are no pins for SPI. I will see if I can get a finer resolution for trip points in over-current vs the comparator method. The comparator method works perfectly on an existing system(higher voyage swing under stress) but the new system has a lot higher gear ratio of 75:1 and it is far more difficult to create a trip condition if the motor is under unusual friction so that’s why I’m trying to use a better method of detection with tighter trip threshold since with the high ration there is a much lower current output voltage swing, the motor>gbox can do damage before the current trips. So smoother current measurement output and finer detection resolution is the goal for today.
1125 x 2001 - 366K
Comments
If this is the case, you already have a motor-current indicator in the output of the PID.
My PID tracks an error. New position - current pos
Pretty neat device http://www.ti.com/lit/ds/symlink/ads1015.pdf
Sure but there are two possible setups for a servo-drive:
1) Velocity mode: Speed regulation is handled within the drive, using feedback from the motor. In this case, the output from the controller's PID is a velocity command. Max PID output results in max motor RPM.
2) Torque mode: In this case, the output of the PID is commanding current output of the drive. 50% command = 50% of the scaled current output of the drive. Monitoring this value is the same as reading the drive's current analog output.
Regarding over-current trip as a means of normal stop detection: The mechanics should be built to not be overly stressed when motor is at full toque against the stop. Anything else won't last.
Alternatives would be use a measuring device like an encoder or just a basic limit sensor to tell the controller when to stop - before reaching the mechanical end! And you still should have electrical cut-outs backing those up.
yes, you need the (correct) drop across the shunt, but the simplest is to use I^2*R for power loss - here you have 2*2*0.1 = 0.4W (that 0.1 ohms drops 0.2V at 2A, & 0.2V *2A = 0.4W)
"The maximum differential input voltage for accurate measurements
is 0.5 V, which produces a 100-μA output current. A differential input voltage of up to 2 V will not cause damage."
Or what about a trim pot divider on the plus input (V+)
Side note, since the ADC is a 4 input, I would like to find a way to get the voltage drop difference from the shunt into one of the ADS inputs so there could be a shutdown if that max value 2V was exceeded. What circuit would allow the difference to be determined and sent to the ADS input? The INA138 is a differential input with a specific output based on the difference but it would be nice to just have a raw voltage to an input to measure without having to run the math involved if only using the INA138, since the output the INA138 will be gained with a trimpot.
Man, you really don't let the grass grow under your feet