

Hello, any chance of data logging through XBEE?
 hans90
Posts: 29
hans90
Posts: 29
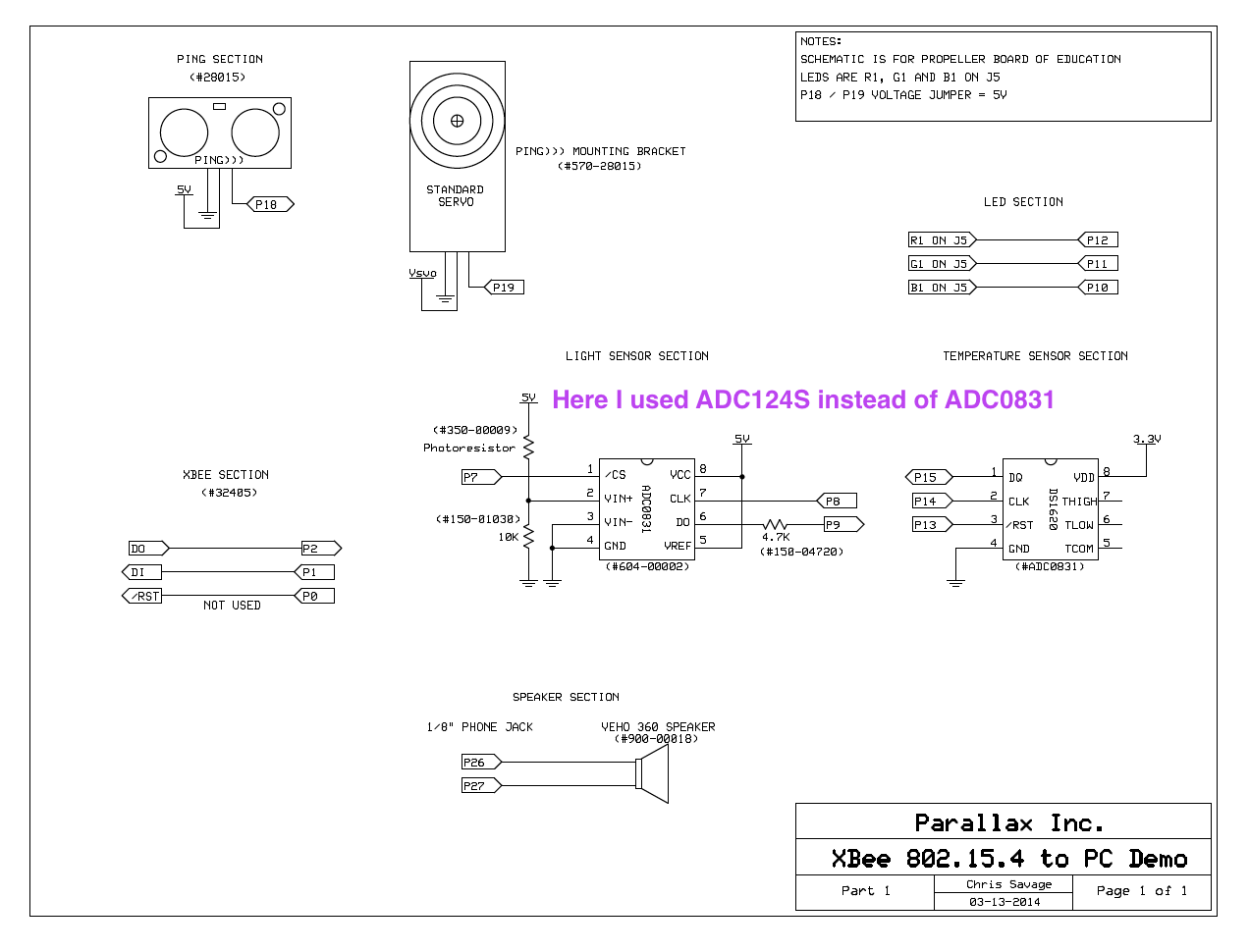
Hi there, I am recently into learning data logging through XBEE to host PC. With the help of XBEE demo and wonderful tips from prop forum masters learn.parallax.com/tutorials/projects/xbee-802154-pc-demo/xbee-and-usb-connections, I was able to incorporate the Boe Bot code to my Activity Bot (ABot) and display on data loggings PST by using XBees. However my goal is to data log Temperature, Light level and Distance into Text file on PC through XBee. (BTW I have successfully tried a project to save data loggings into SD card and then export it to Excel file on PC)
So now how can I create a Text file and data logging onto my PC in real time by using XBee?
So now how can I create a Text file and data logging onto my PC in real time by using XBee?
''***************************************
''* XBee 802.15.4 to PC Demo V1.0 *
''* Author: Chris Savage *
''* Copyright (c) 2014 Parallax, Inc. *
''* See end of file for terms of use. *
''***************************************
CON
_clkmode = xtal1 + pll16x ' Standard Crystal, 16x Multiplier
_xinfreq = 5_000_000 ' 5MHz Crystal
CLK_FREQ = ((_clkmode - xtal1) >> 6) * _xinfreq ' ADC124S module timming cons
MS_001 = CLK_FREQ / 1_000
US_001 = CLK_FREQ / 1_000_000
CON
DEBUG = 0 ' Parallax Serial Terminal Module
A_PORT = 1 ' XBee Module
'A_RESET = 0 ' To RST pin on XBee Module/Adapter (Not Used)
A_TX = 1 ' To DI pin on XBee Module/Adapter
A_RX = 2 ' To DO pin on XBee Module/Adapter
'
RX1 = 31 ' ADS124S programming / terminal
TX1 = 30
SDA = 29 ' ADS124S eeprom / i2c
SCL = 28
BAUD = 9600 ' Baud Rate 9600 bps
CON
ADC_CS = 21 ' ADC124S021 connections
ADC_SCL = 20
ADC_DO = 19
ADC_DI = 18
LED_BLUE = 5 ' To Blue LED (B1)
LED_GREEN = 4 ' To Green LED (G1)
LED_RED = 3 ' To Red LED (R1)
DS1620_RST = 8 ' To DS1620 RST pin (3)
DS1620_CLK = 9 ' To DS1620 CLK pin (2)
DS1620_DAT = 10 ' To DS1620 DAT pin (1)
RLY_PIN = 17 ' To servo header pin (17)
PING_PIN = 0 ' To PING pin (0)
SVO_PIN = 16 ' To servo header pin (16)
CR = 13 ' Carriage Return
SP = 32 ' Space Character
HOME = 1
GOTOXY = 2
CRSR_LF = 3
CRSR_RT = 4
CRSR_UP = 5
CRSR_DN = 6
BELL = 7
BKSP = 8
TAB = 9
LF = 10
CLREOL = 11
CLRDN = 12
GOTOX = 14
GOTOY = 15
CLS = 16
CON
_dopin = 22 ' DO pin on microSD
_clkpin = 23 ' CLK pin on microSD
_dipin = 24 ' DI pin on microSD
_cspin = 25 ' CS pin on microSD
_cdpin = -1 ' -1 if unused.
_wppin = -1 ' -1 if unused.
_rtcres1 = -1 ' -1 always.
_rtcres2 = -1 ' -1 always.
_rtcres3 = -1 ' -1 always.
_lpin = 26 ' -1 if unused.
_rpin = 27 ' -1 if unused.
_volume = 3 ' Default volume.
_ditherEnable = true ' "true" or "false" please.
_ditherLevel = 4 ' 0 = Most Dither ... 31 = Least Dither.
VAR
long stack[40], spinPlayerStack[100], flasherStack[20] ' stack[40] is the 40 long of stack spaces reserved for Telemetry method
OBJ
fds : "FullDuplexSerial4port"
dio : "dataIO4port"
servo : "Servo32v7"
ping : "Ping"
temp : "DS1620"
adc : "jm_adc124s021"
dac : "WAV-Player_DACEngine.spin"
PUB Main | value, index, char, t, ch, counts, volts
dira[LED_BLUE..LED_RED]~~ ' Set LED pins to output
dira[RLY_PIN]~~ ' Set Relay pin to output
fds.Init
fds.AddPort(A_PORT, A_RX, A_TX, -1, -1, 0, %000000, BAUD) ' XBee Module defined to transmit to PC
fds.AddPort(DEBUG, 31, 30, -1, -1, 0, %000000, BAUD) ' Debug Module defined to serial terminal PST, NOT USED HERE!
fds.Start ' Start the XBee and Debug ports
servo.Start ' Start Servo object
Pause(100) ' UART startup delay
servo.Set(SVO_PIN, 1375) ' Pre-set servo position (center)
dac.FATEngineStart(_dopin, _clkpin, _dipin, _cspin, _wppin, _cdpin, _rtcres1, _rtcres2, _rtcres3)
dac.DACEngineStart(constant(_lpin | (not(not(_ditherEnable)))), constant(_rpin | (not(not(_ditherEnable)))), _volume)
' Above Never fail - no need to check return value.
if(_ditherEnable)
dac.DACDitherEngineStart(_lpin, _rpin, _ditherLevel)' Never fails - no need to check return value.
cognew(Telemetry, @stack) ' launch a NEW COG to run telemetry method with reserved stack[40] space for telemetry
repeat
char := fds.rx(A_PORT) ' Get command
if char == "!" ' Parse the preamble character, get first symbol command header
char := fds.rx(A_PORT)
if char == "c" ' get first char: c, s, i
char := fds.rx(A_PORT)
if char == "l"
char := fds.rx(A_PORT)
if char == "r"
clr ' Clear the terminal screen
if char == "s" ' get second char: c, s, i
char := fds.rx(A_PORT)
if char == "v"
char := fds.rx(A_PORT)
if char == "o"
char := fds.rx(A_PORT)
if char == "1"
servo.Set(SVO_PIN, 500) ' Position servo 90 degrees right
if char == "2"
servo.Set(SVO_PIN, 1375) ' Position servo center
if char == "3"
servo.Set(SVO_PIN, 2250) ' Position servo 90 degrees left
if char == "n"
char := fds.rx(A_PORT)
if char == "d"
char := fds.rx(A_PORT)
if char == "1"
dac.playWAVFile(string("1.wav")) ' Play WAV file
if char == "2"
dac.playWAVFile(string("2.wav"))
if char == "3"
dac.playWAVFile(string("3.wav"))
if char == "4"
dac.playWAVFile(string("4.wav"))
if char == "5"
dac.playWAVFile(string("5.wav"))
if char == "6"
dac.playWAVFile(string("6.wav"))
if char == "7"
dac.playWAVFile(string("7.wav"))
if char == "8"
dac.playWAVFile(string("8.wav"))
if char == "9"
dac.playWAVFile(string("9.wav"))
if char == "0"
dac.playWAVFile(string("0.wav"))
if char == "i" ' get second char: c, s, i
char := fds.rx(A_PORT)
if char == "n"
char := fds.rx(A_PORT)
if char == "r"
char := fds.rx(A_PORT)
if char == "0" ' Red LED off
outa[LED_RED]~
if char == "1" ' Red LED on
outa[LED_RED]~~
if char == "g"
char := fds.rx(A_PORT)
if char == "0" ' Green LED off
outa[LED_GREEN]~
if char == "1" ' Green LED on
outa[LED_GREEN]~~
if char == "b"
char := fds.rx(A_PORT)
if char == "0" ' Blue LED off
outa[LED_BLUE]~
if char == "1" ' Blue LED on
outa[LED_BLUE]~~
PUB clr
fds.tx(A_PORT, 0) ' Clear Screen
PUB Telemetry | tF, value, range, t, ch, counts, volts
temp.start(DS1620_DAT, DS1620_CLK, DS1620_RST) ' Start DS1620 object
adc.start(ADC_CS, ADC_SCL, ADC_DI, ADC_DO) ' Start ADC124S object
t := cnt
ch := 0 ' channel A/D 0 is selected
repeat
tF := temp.gettempf ' Get F Temp from DS1620
fds.tx(A_PORT, 1) ' Clear Screen HOME
fds.str(A_PORT, string("Temperature =")) ' print (Temp in °F)
dio.decf(A_PORT, tf / 10, 3) ' Whole number portion
fds.tx(A_PORT, ".") ' Decimal Point
dio.dec(A_PORT, tf // 10) ' Tenths of Degrees
fds.str(A_PORT, string("° F ")) ' print °F
fds.tx(A_PORT, 13) ' Carriage Return
counts := adc.read(ch) ' read counts from ADC124
fds.str(A_PORT, string("Light Level = ")) ' Label (Light Level)
dio.dec(A_PORT, counts) ' Display raw value
fds.str(A_PORT, string("/4095 ", 13))
range := ping.Inches(PING_PIN) ' Get Inches from PING))) sensor
fds.str(A_PORT, string("Distance = ")) ' Label (Distance)
dio.dec(A_PORT, range) ' Display Range in Inches
fds.str(A_PORT, string(" Inches "))
fds.tx(A_PORT, 13) ' Carriage Return
Pause(1000) ' One second (1000 mS) delay
PRI Pause(ms)
waitcnt(clkfreq / 1000 * ms + cnt) ' Convert to mS
DAT
{<end of object code>}
{{
┌──────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────┐
│ TERMS OF USE: MIT License │
├──────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────┤
│Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation │
│files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, │
│modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software│
│is furnished to do so, subject to the following conditions: │
│ │
│The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.│
│ │
│THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE │
│WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR │
│COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, │
│ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE. │
└──────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────┘
}}
1272 x 970 - 97K