

Using Arlo Hardware (HB-25) with Spin OPP#8
 Duane Degn
Posts: 10,588
Duane Degn
Posts: 10,588
Direct Link to Eddie Firmware for Propeller Activity Board with HB-25 Controllers (.zip file)
Direct Link to Eddie Firmware for Original Eddie Control Boad (.zip file)
A while back Ken introduced the Open Propeller Project #8.
I took up the challenge of porting the Eddie firmware to work with an Activity Board and HB-25 motor controllers.
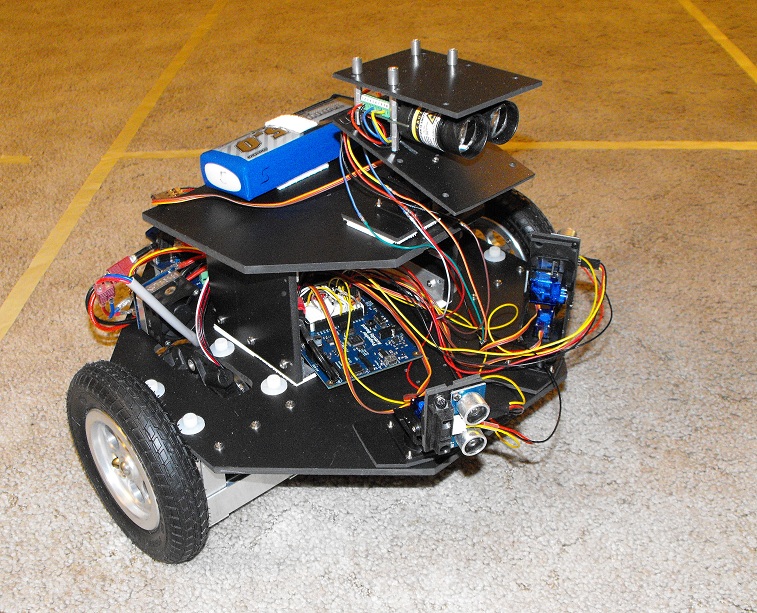
My test bed for the code was a robot I named "Cleaver."(Sorry, dead link.) My robot doesn't look a lot like Arlo but the distance between the wheels is the same so the control algorithms should behave similarly on both robots.
I thought my ported version of the code offered several new features would would benefit the original Eddie hardware so I also make an Eddie hardware version of the program.
As requested by Ken, I added a integral component to the control algorithm. This portion of the algorithm works a bit better using the HB-25 hardware than the conventional h-bridge hardware. The conventional h-bridge hardware had a harder time finding the exact encoder count compared with the HB-25 hardware. I think this has more to do with my control algorithm than any fault with the hardware.
The analog to digital converter code was modified to use the Activity Board's ADC. Since the original Eddie had an 8 channel ADC and the AB uses a 4 channel ADC, I repeated the four ADC results so the "ADC" command was backwards compatible with the Eddie firmware.
Ken also requested an "ARC" command. I added this command and also a command to allow one to set the distance of travel of the individual wheels (PATH).
The original Eddie firmware used encoder ticks as the unit of distance. I kept this unit of distance but I also added commands which used millimeters as the unit of distance.
My GitHub account is a mess and I need to organize it but until I do, here's a link to the modified Eddie firmware.
While the repository is a mess, the ReadMe for the "EddieFirmware" repository accurately describes which archive you'll need based on the hardware used. There are also direct links to the archives at the top and bottom of this post.
Note: Parallax now has a new motor control board. The "Arlo Complete Robot System" uses the DHB-10 dual motor controller. I imagine the Eddie Firmware could be modified for use with this hardware. The DHB-10 product page includes Spin code for this board.
Edit: After review more details about the BHB-10 firmware, it looks like the firmware will take care of motor control tasks just fine on its own. I may "port" the Eddie firmware for use with the DHB-10 but I doubt there will be a need to do so. The DHB-10 firmware looks like it does things just fine as it is.
The DHB-10 firmware isn't a complete replacement for the Eddie firmware since (as far as I'm aware) the DHB-10 board doesn't have an ADC nor ways to easily mount Ping sensors (I'm not sure about the Ping comment).
Direct Link to Eddie Firmware for Propeller Activity Board with HB-25 Controllers (.zip file)
Direct Link to Eddie Firmware for Original Eddie Control Boad (.zip file)
Direct Link to Eddie Firmware for Original Eddie Control Boad (.zip file)
A while back Ken introduced the Open Propeller Project #8.
I took up the challenge of porting the Eddie firmware to work with an Activity Board and HB-25 motor controllers.
My test bed for the code was a robot I named "Cleaver."(Sorry, dead link.) My robot doesn't look a lot like Arlo but the distance between the wheels is the same so the control algorithms should behave similarly on both robots.
I thought my ported version of the code offered several new features would would benefit the original Eddie hardware so I also make an Eddie hardware version of the program.
As requested by Ken, I added a integral component to the control algorithm. This portion of the algorithm works a bit better using the HB-25 hardware than the conventional h-bridge hardware. The conventional h-bridge hardware had a harder time finding the exact encoder count compared with the HB-25 hardware. I think this has more to do with my control algorithm than any fault with the hardware.
The analog to digital converter code was modified to use the Activity Board's ADC. Since the original Eddie had an 8 channel ADC and the AB uses a 4 channel ADC, I repeated the four ADC results so the "ADC" command was backwards compatible with the Eddie firmware.
Ken also requested an "ARC" command. I added this command and also a command to allow one to set the distance of travel of the individual wheels (PATH).
The original Eddie firmware used encoder ticks as the unit of distance. I kept this unit of distance but I also added commands which used millimeters as the unit of distance.
My GitHub account is a mess and I need to organize it but until I do, here's a link to the modified Eddie firmware.
While the repository is a mess, the ReadMe for the "EddieFirmware" repository accurately describes which archive you'll need based on the hardware used. There are also direct links to the archives at the top and bottom of this post.
Note: Parallax now has a new motor control board. The "Arlo Complete Robot System" uses the DHB-10 dual motor controller. I imagine the Eddie Firmware could be modified for use with this hardware. The DHB-10 product page includes Spin code for this board.
Edit: After review more details about the BHB-10 firmware, it looks like the firmware will take care of motor control tasks just fine on its own. I may "port" the Eddie firmware for use with the DHB-10 but I doubt there will be a need to do so. The DHB-10 firmware looks like it does things just fine as it is.
The DHB-10 firmware isn't a complete replacement for the Eddie firmware since (as far as I'm aware) the DHB-10 board doesn't have an ADC nor ways to easily mount Ping sensors (I'm not sure about the Ping comment).
Direct Link to Eddie Firmware for Propeller Activity Board with HB-25 Controllers (.zip file)
Direct Link to Eddie Firmware for Original Eddie Control Boad (.zip file)
Comments
Edited(3/4/20): Fixed YouTube link.
Feel free to reply.