

ELEV8 - v3 - Initiate issue

I haven't been flying for a while - windy and rain here in the midwest.
When I started up my ELEV8 - it didn't initiate correctly. Two props spun up, two didn't. When I came out of initiate just one prop kept spinning.
I fiddled with it and flew for a while - but it seemed uncharacteristically touchy.
I took it into the shop and attached it to the bench.
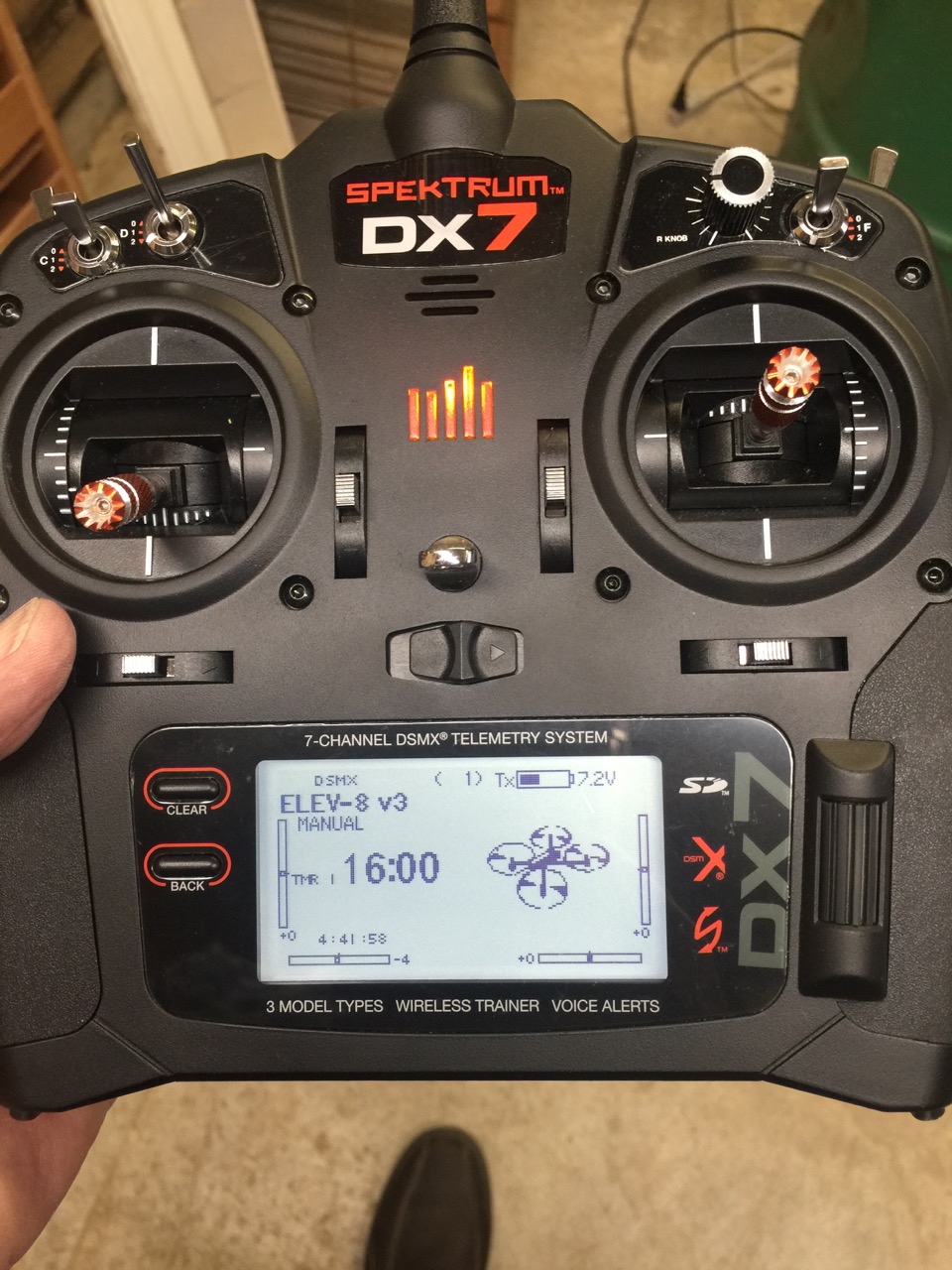
The attached videos show the problem. One video is initiate - the other is an attempt to spin up all the props after initiate. They did spin up - at about 1/2 throttle. The image shows the settings on the controller.


Suggestions for how to troubleshoot this issue would be appreciated.
KenMc
When I started up my ELEV8 - it didn't initiate correctly. Two props spun up, two didn't. When I came out of initiate just one prop kept spinning.
I fiddled with it and flew for a while - but it seemed uncharacteristically touchy.
I took it into the shop and attached it to the bench.
The attached videos show the problem. One video is initiate - the other is an attempt to spin up all the props after initiate. They did spin up - at about 1/2 throttle. The image shows the settings on the controller.
Suggestions for how to troubleshoot this issue would be appreciated.
KenMc
960 x 1280 - 312K
Comments
ie. this will indicate if the issue is at (or before) the FC, versus at (or after) the ESC's.
FC plug / ESC plug
1/1
2/2
3/4
4/3
Initiate 4 spins others still
partial throttle 2 spins
Test two - add swap 1/2
FC plug / ESC plug
1/2
2/1
3/4
4/3
Initiate 4 spins others still
partial throttle 2 spins
In both cases adding throttle eventually had all spinning
I'm guessing I should reload the FC firmware. Or plug in the ground station and see if it shows anything odd.
I'm reluctant to take drastic action until I know what's caused the issue.
KenMc
It looks like it could be the controller thinking that it's not correctly oriented in yaw, and it corrects that by spinning diagonally opposite pairs faster / slower. If you were "off" by enough, and the throttle is relatively low, one pair would spin really fast before the other pair spun up. Once the heading was correct you'd see the other pair come up to speed.
When you arm, the target heading is reset to whatever it is at the moment of arming, and it keeps doing so if the throttle is less than -900. As soon as you start pushing the throttle above that, it "locks in" and tries to hold that commanded heading. If your throttle never goes below the -900 threshold, when you arm and you push the rudder stick far to one side, you're telling it to change heading, but the "reset on takeoff" behavior counters that.
To see if this is the problem, connect to GroundStation and see what your lowest throttle setting is. You can also arm the quad, then push the rudder stick in the opposite direction as when you armed for a moment - you should notice the prop speeds even out as you tell the quad that the heading you want is back in line with where it actually is.
Running the controller calibration lets the FC know what the limits of your physical controller are so it can adjust the numbers internally. If your radio never puts out a value of more than say -500, when you calibrate, the code sees that and tells the FC to double the value when its read in, making sure that the various other logic works properly. This is also why it's recommended to set the control sensitivity on the FC itself instead of on the controller. Doing it on the controller reduces the range of values seen by the FC and reduces precision.
If any of that isn't clear let me know.
FWIW - this was an operational copter - it had just been sitting for a few weeks.
Thanks for the detail.
KenMc
Double check that you haven't changed any radio settings - that'd be my first test. After that, maybe reset the throttle range in the ESCs? If they lost their range settings that would very certainly affect flight characteristics, and could also be the cause of the varying throttle responses.
Then I did the ESC Calibration: - And the problem disappeared.
Step 25: Calibrate the ESC Throttle Range
http://learn.parallax.com/tutorials/robot/elev-8/elev-8-v3-quadcopter-assembly-guide/section-7-configure-escs/step-25
So, I guess the question is - How did the ESCs lose their setup? Since this copter had at least 1.5 hours of flight time.