

Anybody knows how to find a route for my ABOT based on moving PING))) feed back?
 hans90
Posts: 29
hans90
Posts: 29
I have built an Activity bot with a PING))) mounted on the front servo to turn 180 degrees. I have learned the Propeller tutorial on the fixed PING))) roaming. However I am stuck on how to find a route for my Activity Bot based on the distance fed back by the moving PING))) at front. My idea was as follows:
1. get PING))) distance from constant reading (0-180 deg) while ABOT is running forward
2. if ABOT spots any PING))) distance shorter than 15 cm than ABOT stops
3. ABOT sort out the max distance corresponding to that Front Servo's angle array and turn so that the ABOT is facing straight to the direction with max distance
4. repeat the loop
Does this make sense? I felt trouble to update constant PING))) readings then find out a route to go and turn, while ABOT is running forward, how can I achieve that in SimpleIDE?
1. get PING))) distance from constant reading (0-180 deg) while ABOT is running forward
2. if ABOT spots any PING))) distance shorter than 15 cm than ABOT stops
3. ABOT sort out the max distance corresponding to that Front Servo's angle array and turn so that the ABOT is facing straight to the direction with max distance
4. repeat the loop
Does this make sense? I felt trouble to update constant PING))) readings then find out a route to go and turn, while ABOT is running forward, how can I achieve that in SimpleIDE?
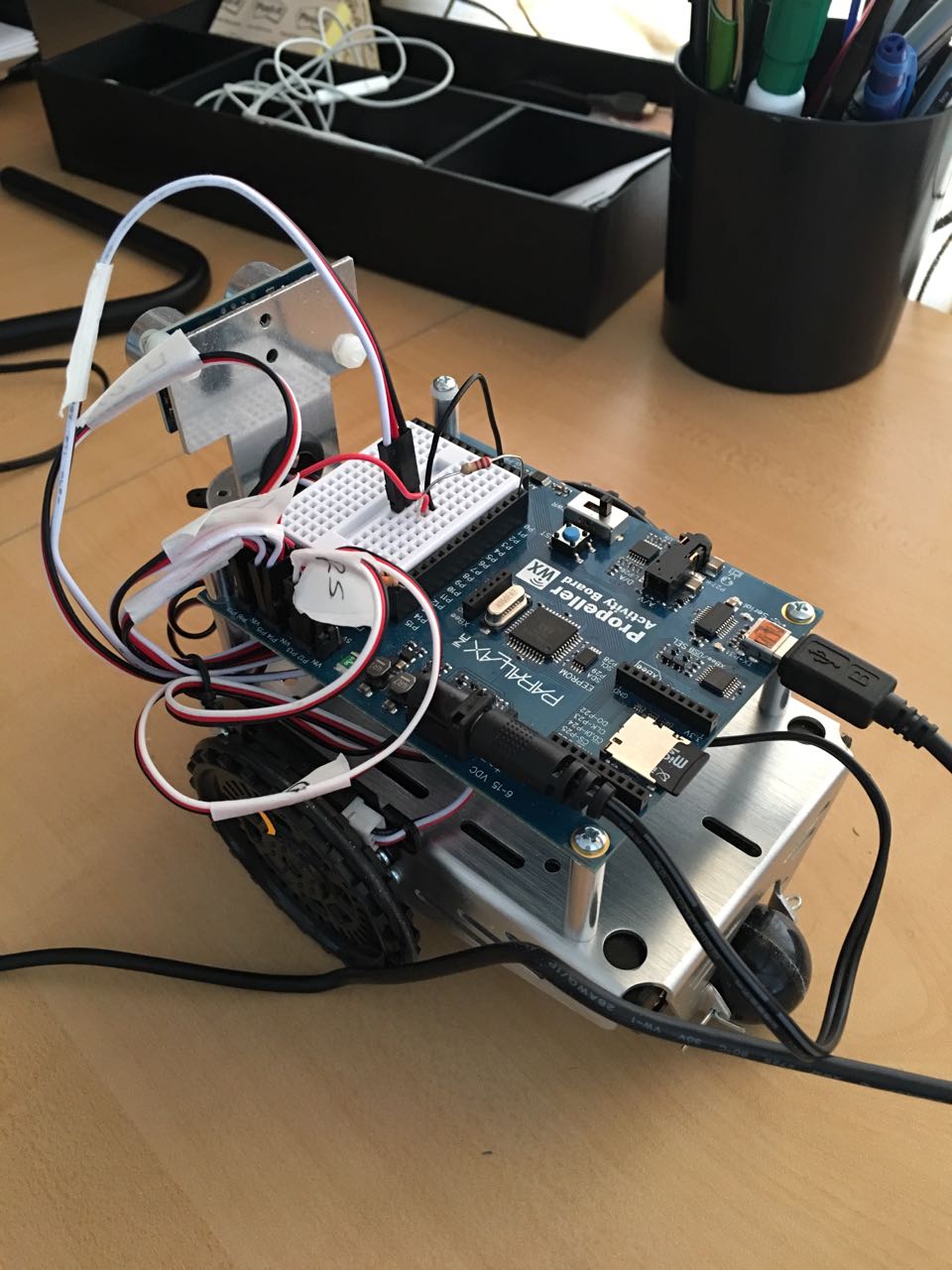
960 x 1280 - 145K
Comments
One thing to be aware of is the angle the ultrasound is going to bounce off. If the plane of the object is far off 90 degrees to the ping axis, the sound will not bounce directly back to ping and may give an erroneously large distance (either due to bouncing off multiple objects before returning or never returning.)
Tom
1. move forward for 1m.
2. stop and scan area in front by turning turret (0-180 deg)
3. sort out the maximum distance and corresponding turret's angle
4. turn the car to the maximum distance direction (still working on)
5. repeat the loop
I finished step 1 to 3, however I am stuck at some strange issues as followings:
First issue is that after it prints distance and turret angles, the turret is stuck at 180 deg and it won't turn back to 90 deg as it is supposed so.
Second issue is I heard my turret servo buzzing noisily at the end of the program and it felt super hot when I touched it.
And then, somehow after I compiled other programs and unplug and plug it back and power cycled it, these issue are amazingly gone! But they will come back some time after I tried to debug some new codes! I am just confused...
On some of my servos, I limit rotation from 5 deg to 175 deg.
In the program you attached, you only have 1 cycle of move, measure, turn. Is that correct? Since the last step in the program tries to rotate the servo back to 90 degs, it seems that it may be stuck at 180.
Also when you have the servo move back to 90 deg, you should add a pause to give it time to finish moving before going to the next step in the program. In this case, the servo has a command to move to 90 and should do that even though the program ends immediately after sending the command (unless the servo ramp function is only sending incremental rotation commands. In that case even if not stuck, the servo would only move the amount specified in the servo angle function based on the ramp function).
Different models of servos move different amounts with the same change in pulse length. You really need to experiment a bit to find the range of motion of your servo and IMO, you're better off using your own pulse to angle conversion factor.
I added an ultrasound sensor to my S2. Whenever the S2 detected an obstacle, it would look around for the largest distance. It would then drive in the direction of this longest distance until it reached another obstacle. This algorithm turned out to produce rather boring behavior from the robot. It pretty much just drove back and forth across the room.
Here's a link to the project.
The S2 had IR obstacle detectors besides the ultrasound sensor. It turns out these two sensors working together are pretty good at detecting obstacles. Ultrasound alone will not detect objects with padding like couches. Ultrasound also doesn't detect hard flat surfaces from shallow angles of approach. Ultrasound is better than IR when it comes to detecting things like chair legs.
You might want to think about adding some sort of IR sensor to your robot.
The code I used with the S2 is attached to the above linked post. The ultrasound on the S2 wasn't on a servo. I had the whole robot turn to point the sensor.
I have reduced the turret servo range to 5 - 175 deg and added pause for it turn back to 90 deg, it all worked!
However, I have a new problem
So how can I convert a float into an integer?
Much thanks for any light!
/* ABOT roaming with PING))) */ #include "abdrive.h" #include "simpletools.h" // Include simpletools header #include "servo.h" // Include servo header #include "ping.h" // Include ping header int adeg[35]; // 36 degree updates/elements by Front Servo int adist[35]; // 36 distance elements by PING))) int main() // Main function { int count = 0; int location = 0; float left = 0; float right = 0; float circum; float ticks; //drive_ramp(64, 64); // Ramp forward 64ticks/s //pause(4800); // Ramp forward for 4.8s for 1m //drive_ramp(0, 0); // Stop servo_setramp(16, 40); // Ramp up the PING))) servo to 40 deg per update, faster moving servo to 0 deg servo_angle(16, 0); // Starts PING))) servo to 0 degree pause(1000); // Allow 1 second to get there servo_setramp(16, 10); // Set back PING))) servo to ramp down to 10 deg per update for(int deg = 50; deg <= 1750; deg += 50) // use for instead of while for PING))) servo degree update { servo_angle(16, deg); // Ramps PING))) servo from 0 to 180 deg pause(150); // Stay still for 0.15 sec after each time PING))) servo moves for ABOT to update PING))) adeg[count] = deg/10; adist[count] = ping_cm(0); // Get cm distance from Ping))) print("distance is = %d\n", adist[count]); // Display distance print("degree is = %d\n", adeg[count]); pause(100); // Wait 0.1 second count += 1; } //pause(500); int max = adist[0]; for (count = 1; count < 35; count++) { if (adist[count] > max) { max = adist[count]; location = count; } } print("maximum distance is %d and angle is %d\n", max, adeg[location]); servo_setramp(16, 40); // Reset PING))) servo to 40 deg per update servo_angle(16, 900); // Reset PING))) servo to 90 degree pause(1000); if(adeg[location] < 90) { circum = ((90 - adeg[location]) * PI / 180) * 105.8; ticks = trunc(circum / 3.25); //int t = ticks; left = ticks/2; right = ticks/2; //drive_goto(left, -right); print("cirumference is: %f\ntotal ticks to turn is: %d\nleft ticks is: %d and right ticks is: %d", circum, ticks, left, right); } drive_close(); /* else if(adeg[location] > 90) { turndeg = adeg[location] - 90; rad = turndeg * PI / 180; circum = rad * r; ticks = circum / pertick; left = ticks/2; right = ticks/2; drive_goto(-left, right); } else if(adeg[location] == 90) { drive_ramp(0, 0); // Stop } */ }However it still has some issues: the most noticeable is that the ABOT will not work on shallow angles with my current design and it will hit against the wall! How can I solve it with my only mounted turret PING)))? (or should I add couple of IRs to compensate dead angles?)
This is one of the big weaknesses when using ultrasound for obstacle detection. Combining ultrasound with IR should greatly improve the bot's ability to detect obstacles.
You could try shortening the distance travel between ping scans, and then determine if the distance to objects (walls) on the right or left is getting closer. Then calculate how the distance to the object on the near side changes with the traveling distance. Then calculate how much further forward you can travel before hitting the wall.
It is a bit more math and some more complex programing, but it would be an interesting exercise; you could try it before adding the ir.
Tom
Thanks Tom Thanks Duane!